

2.Функции, общие характеристики и примеры cad/cam/cae…
Функции CAD-систем в радиоэлектроники подразделяют на функции двухмерного (2D) и трехмерного (3D) проектирования. К функциям 2D относятся черчение, оформление конструкторской документации; к функциям 3D – получение трехмерных моделей, метрические расчеты, реалистичная визуализация, взаимное преобразование 2D и 3D моделей. Среди CAD-систем различают «легкие» и «тяжелые» системы. Первые из них ориентированы преимущественно на 2D графику, сравнительно дешевы и менее требовательны в отношении вычислительных ресурсов. Вторые ориентированы на геометрическое моделирование (3D), более универсальны, дороги, оформление чертежной документации в них обычно осуществляется с помощью предварительной разработки трехмерных геометрических моделей. С ростом возможностей персональных ЭВМ грани между «тяжелыми» и «легкими» CAD/CAM-системами постепенно стираются. Наиболее известны следующие CAE/CAD/CAM-системы в радиоэлектронике. «Тяжелые» системы: SolidWorks; Pro/Engineer, CATIA, EUCLID, CADDS.5 и др. «Легкие» системы: AutoCAD; АДЕМ; bCAD; Caddy; КОМПАС; СПРУТ; Кредо. Функции САЕ-систем довольно разнообразны, так как связаны с проектными процедурами анализа, моделирования, оптимизации проектных решений. САЕ-систем прежде всего включают про-граммы для следующих процедур:•моделирование полей физических величин, в том числе анализ прочности, который чаще всего выполняется в соответствии с МКЭ;•расчет состояний и переходных процессов на макроуровне;•имитационное моделирование сложных производственных систем на основе моделей массового обслуживания и сетей Петри. ТРиАНА; SIwave; Speed XP; Flotherm; Основные функции САМ-систем: •разработка технологических процессов, •синтез управляющих программ для технологического оборудования с числовым программным управлением (ЧПУ), •моделирование процессов обработки, в том числе построение траекторий относительного движения инструмента и заготовки в процессе обработки, •генерация постпроцессоров для конкретных типов оборудования с ЧПУ (NC – Numerical Control), •расчет норм времени обработки. Genesis 2000; CAM350; CAMMaster; GerbTool; CAMtastic; Trilogy 5000; Enterprise 3000. Electronic Design Automation (EDA, автоматизация проектирования электронных приборов) — комплекс программных средств для облегчения разработки электронных устройств, создания микросхем и печатных плат. Комплекс позволяет создать принципиальную электрическую схему проектируемого устройства с помощью графического интерфейса, создавать и модифицировать базу радиоэлектронных компонентов, проверять целостность сигналов на ней. Введённая схема непосредственно или через промежуточный файл связей может быть преобразована в заготовку проектируемой печатной платы, с различной степенью автоматизации. Современные программные пакеты позволяют выполнить автоматическую расстановку элементов, и автоматически развести дорожки на чертеже многослойной печатной платы, соединяя тем самым выводы радиоэлектронных компонентов в соответствии с принципиальной схемой. Системы автоматизации проектирования электроники могут иметь возможность моделирования разрабатываемого устройства и исследования его работы до того, как оно будет воплощено в аппаратуру. P-CAD;OrCAD;Electric;Proteus;KiCad;gEDA;TopoR;QUCS
8.Матрицы преобразования.
Матрицы преобразования, действуют на точки объекта при его перемещении и повороте. Трансляция При трансляции объекта на величины а,b и с в направлениях x, y и z соответственно по отношению в начальному положению, в котором модельная система координат совпадала с мировой, мировые координаты точек объекта в новом положении (Xw, Yw Zw) вычисляются следующим образом:
X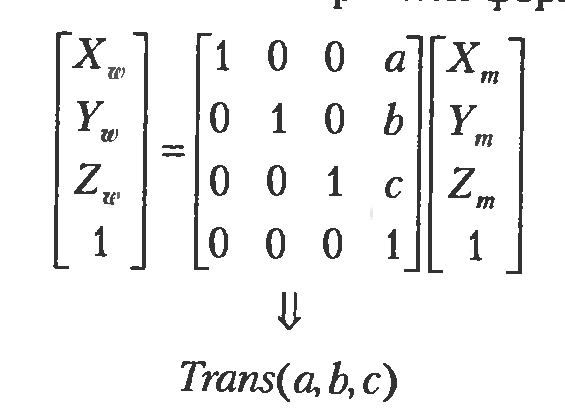 w=
Xm+a;
Yw=Ym+b;
Zw=Zm
+ с/ В этой формуле числа Хт, Ym, Zm являются
также модельными координатами точки.
Формула
может быть записана в матричной форме:
w=
Xm+a;
Yw=Ym+b;
Zw=Zm
+ с/ В этой формуле числа Хт, Ym, Zm являются
также модельными координатами точки.
Формула
может быть записана в матричной форме:
В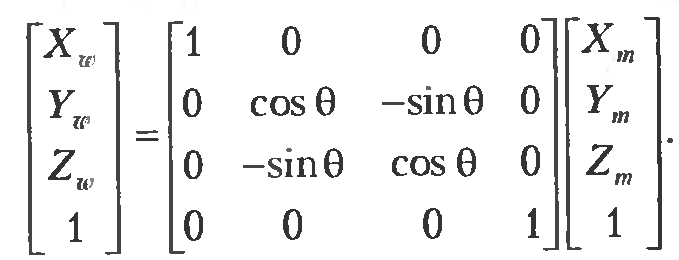
 ращение
Пусть
объект поворачивается на угол G
вокруг оси х мировой системы координат
вместе со своей модельной системой,
которая, как и в предыдущем случае,
изначально совпадает с мировой. Мировые
координаты точки объекта в новом
положении (Xw, Yw Zw) могут быть получены
из исходных мировых координат этой
точки (Хm,
Ym,
Zm),
совпадающих с ее текущими координатами
в модельной системе. Соотношение между
(Xw, Yw Zw) и (Хm,
Ym,
Zm)
становится очевидным после проецирования
на плоскость yz.
Получаем равенства: Xw=
Хm;
Yw
= Lcos(θ
+ a)
=L(cosθcosa-sinθsina)
=Lcosacosθ-Lsinasinθ
= Ymcosθ-Zmsinθ;
Zw
= Lsin(θ
+ a)
=L(sinθcosa-cosθsina)
=Lcosasinθ-Lsinacosθ
= Ymsinθ-Zmcosθ;.
Равенства могут быть записаны в
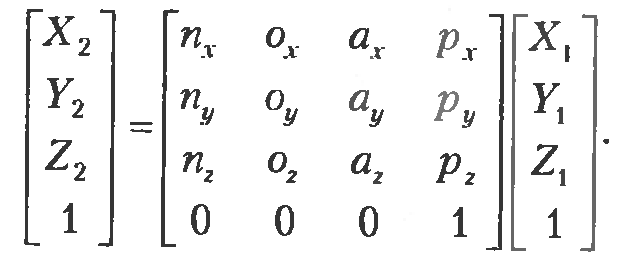
матричной форме. Отображение
состоит в вычислении координат точки
в некоторой системе координат по
известным координатам той же точки в
другой системе координат. Рассмотрим
две системы координат. Предположим, что
координаты (X2,Y2,Z2)
точки Р в системе координат х2 у2 z2
должны быть вычислены по координатам
(X1,Y1,Z1
)той же точки в системеx1
y1
z1
Далее, предположим, что вычисление
производится применением матрицы
преобразования Т1-2
к
известным координатам: [Х2 Y2
Z2
]T
= Т1-2
[X1
Y1
Z1]T
Записав
матрицу Т1-2
в
явном виде, мы получим следующее
выражение:
ращение
Пусть
объект поворачивается на угол G
вокруг оси х мировой системы координат
вместе со своей модельной системой,
которая, как и в предыдущем случае,
изначально совпадает с мировой. Мировые
координаты точки объекта в новом
положении (Xw, Yw Zw) могут быть получены
из исходных мировых координат этой
точки (Хm,
Ym,
Zm),
совпадающих с ее текущими координатами
в модельной системе. Соотношение между
(Xw, Yw Zw) и (Хm,
Ym,
Zm)
становится очевидным после проецирования
на плоскость yz.
Получаем равенства: Xw=
Хm;
Yw
= Lcos(θ
+ a)
=L(cosθcosa-sinθsina)
=Lcosacosθ-Lsinasinθ
= Ymcosθ-Zmsinθ;
Zw
= Lsin(θ
+ a)
=L(sinθcosa-cosθsina)
=Lcosasinθ-Lsinacosθ
= Ymsinθ-Zmcosθ;.
Равенства могут быть записаны в
матричной форме. Отображение
состоит в вычислении координат точки
в некоторой системе координат по
известным координатам той же точки в
другой системе координат. Рассмотрим
две системы координат. Предположим, что
координаты (X2,Y2,Z2)
точки Р в системе координат х2 у2 z2
должны быть вычислены по координатам
(X1,Y1,Z1
)той же точки в системеx1
y1
z1
Далее, предположим, что вычисление
производится применением матрицы
преобразования Т1-2
к
известным координатам: [Х2 Y2
Z2
]T
= Т1-2
[X1
Y1
Z1]T
Записав
матрицу Т1-2
в
явном виде, мы получим следующее
выражение: