

4.5. Алгоритм улучшения плана
Сформулируем теперь алгоритм перехода к новому опорному плану, дающему меньшее значение функции потерь. Прежде, чем формулировать его в общем виде, покажем его основные моменты на том примере, который мы начали рассматривать.
Вспомним, что ограничения двойственной
задачи соответствовали тому, что
,
а выполнение условия
![]() говорило
о том, что соответствующий вектор надо
вводить в базис. Поэтому и выполнение
говорило
о том, что соответствующий вектор надо
вводить в базис. Поэтому и выполнение
условия |
говорит о том, что вектор |
надо вводить в базис. |
У нас условие выполнено в двух случаях для и . Вообще
принято вводить в базис
тот вектор, для которого
|
максимально. В данном
случае это вектор
|
но в учебных целях мы |
введем в базис вектор
|
Введение в базис вектора означает, что мы должны запланировать какую-то перевозку из третьего склада в первый пункт потребления. Пусть величина этой перевозки равна . Поставим ее в клетку, соответствующую i =3, j =1. Тогда мы получим следующий план перевозок:
2 |
3.1 |
|
|
|
3.9 |
4.2 |
|
|
|
2.8 |
6.3 |
Но теперь у нас нарушился баланс запасов и потребностей получилось, что
из третьего склада
вывозится
|
а в первый пункт потребления |
поступает
|
|
Необходимо восстановить баланс запасов и потребностей. Для этого поступают следующим образом: по ненулевым компонентам плана перевозок (включая и компоненту ) строят цикл вида столбец строка столбец строка ... строка (см. рисунок), который начинается и кончается на компоненте .
Теперь для восстановления баланса запасов и потребностей можно поступить очень просто: при движении по столбцу от имеющихся компонентов плана надо отнимать , а при движении по строке наоборот, прибавлять . В результате получится следующий план перевозок, уже сохраняющий баланс запасов и потребностей:
2- |
3.1+ |
|
|
|
3.9- |
4.2+ |
|
|
|
2.8- |
6.3 |
С балансом всё в порядке, но теперь у
нас стало
![]() компонент
плана, а должно быть
компонент
плана, а должно быть
![]() .
Поэтому надо выбрать
так, чтобы одна из бывших компонент
обратилась в нуль, но все остальные
компоненты остались положительными.
Легко догадаться, что для этого
надо взять равным минимальному из тех
чисел, из которых
вычитается. В нашем случае
вычитается из чисел 2; 3.9; 2.8 . Минимальное
из них есть 2 и
поэтому надо взять
=2.
.
Поэтому надо выбрать
так, чтобы одна из бывших компонент
обратилась в нуль, но все остальные
компоненты остались положительными.
Легко догадаться, что для этого
надо взять равным минимальному из тех
чисел, из которых
вычитается. В нашем случае
вычитается из чисел 2; 3.9; 2.8 . Минимальное
из них есть 2 и
поэтому надо взять
=2.
В результате получится новый опорный план следующего вида
|
5.1 |
|
|
|
1.9 |
6.2 |
|
2 |
|
0.8 |
6.3 |
в котором снова будет положенные ему |
компонент. |
Вычисляя транспортные расходы для этого
плана, мы получим
![]() ,
откуда видно, что по сравнению с исходным
планом транспортные расходы уменьшились
на 2 единицы.
,
откуда видно, что по сравнению с исходным
планом транспортные расходы уменьшились
на 2 единицы.
Опишем этот процесс в общем виде.
Итак, пусть для некоторой пары индексов
![]() выполнено
условие
выполнено
условие
![]() .
Тогда вектор
.
Тогда вектор
![]() надо
вводить в базис. Если таких векторов
окажется несколько, то обычно вводят в
базис тот вектор, для которого
надо
вводить в базис. Если таких векторов
окажется несколько, то обычно вводят в
базис тот вектор, для которого
величина разности
|
максимальна. |
Исходя из клетки строят цикл по ненулевым компонентам плана перевозок по маршруту столбец строка столбец строка ... строка, который начинается и заканчивается в клетке . Мы не будем доказывать следующие два утверждения:
такой цикл всегда может быть построен;
такой цикл единственный.
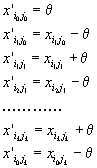
Итак, пусть этот цикл имеет вид
![]()
Установим новый план перевозок вида
Все остальные компоненты плана перевозок, не входящие в цикл, остаются неизменными.
Наконец, выберем
таким образом, чтобы одна из новых
компонент плана обратилась в нуль, а
все остальные остались положительными.
Для этого следует
взять в виде
![]() ,
,
где считается
|
|
В результате получится новый опорный план. Покажем, что этот новый опорный план дает меньшее значение транспортных расходов, чем старый план.
Так как компоненты плана, не входящие в цикл, не изменяются, то их можно не учитывать. Для ненулевых компонент исходного плана
выполнялось условие
|
и поэтому |
![]()
![]()
![]()
Для нового плана перевозок мы имеем
![]()
![]()
![]() В
выражении, стоящем в квадратных скобках,
большинство слагаемых сокращается и
окончательно получаем
В
выражении, стоящем в квадратных скобках,
большинство слагаемых сокращается и
окончательно получаем
![]()
так как мы вводим перевозку, для которой . |
|
Ну, а дальнейшее очевидно: надо повторять все итерации до тех пор, пока не будет получен оптимальный план. В силу конечности числа вершин допустимой области, это может быть сделано за конечное число шагов.
Закончим наш учебный пример. Одну итерацию мы уже проделали.