СТАТИКА
Аксиомы статики
Аксиома 1. Две силы, действующие на абсолютно твердое тело уравновешива-ются только тогда, когда они равны по величине и направлены по од-ной прямой в противоположные стороны (рис. 1.2).
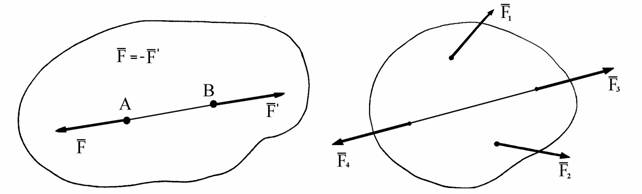
Рис. 1.2 Рис. 1.3
Аксиома 2.
Действие
данной системы сил на абсолютно твердое
тело не изме-нится, если прибавить к ней
или отнять от нее уравновешенную сис-тему
сил
![]() (рис.
1.3).
(рис.
1.3).
Следствие из аксиомы 1 и 2.
Действие силы на абсолютно
твердое тело (АТТ) не изменится, если
точку приложения этой силы перенести
по ли-нии ее действия. Пусть на тело в
точке А действует сила
![]() (рис.
1.4). Добавим в точке В, выбранной произвольно
на линии действия си-лы
,
уравновешенную систему сил
(рис.
1.4). Добавим в точке В, выбранной произвольно
на линии действия си-лы
,
уравновешенную систему сил
![]() и
и
![]() равных
по абсолютной величине
и
направленных по линии ее действия. На
основании аксиомы 1 силы
и
будут
уравновешены и их можно отбросить
(аксиома 2). В результате получим силу
=
,
но приложенную не в точке А, а в точке
В. Отсюда следует, что сила, приложенная
к АТТ, есть вектор скользящий.
равных
по абсолютной величине
и
направленных по линии ее действия. На
основании аксиомы 1 силы
и
будут
уравновешены и их можно отбросить
(аксиома 2). В результате получим силу
=
,
но приложенную не в точке А, а в точке
В. Отсюда следует, что сила, приложенная
к АТТ, есть вектор скользящий.
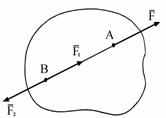
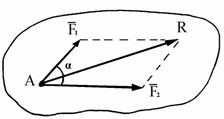
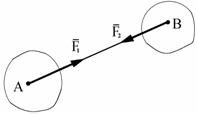
Рис. 1.4 Рис. 1.5 Рис. 1.6
Аксиома 3 Равнодействующая двух сил, приложенных к АТТ в одной точке, равна
их геометрической сумме
![]() , т.е. выражается по моду-лю и направлению
диагональю
, т.е. выражается по моду-лю и направлению
диагональю
параллелограмма,построенного на этих силах (рис. 1.5).
![]()
Аксиома 4 Всякому действию одного тела на другое соответствует равное по величине,
но противоположное по направлению противодействие. Действие и противодействие-это силы,
приложенные к двум раз-личным телам, поэтому они не уравновешиваются (рис. 1.6).
Аксиома 5 Если деформируемое тело под действием системы сил находится в
равновесии, то при отвердевании его равновесие сохраняется.
Под действием сил тело D находится в равновесии. Если трос CB заменить стержнем,
то равновесие не нарушится, равновесие не нарушится и в том случае, если трос BD
за-менить стержнем, если же стержень АВ заменить тросом - равновесие нарушится
(рис. 1.7).
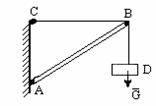
Рис.1.7
Связи и их реакции
Системы сходящихся сил. Теорема о существовании равнодействующей. Условия равновесия.
Система сил называется сходящейся, если линии действия всех сил системы пересекаются в одной точке.
Пусть система сходящихся сил (F1, F2,...,Fn) приложена к твердому телу (рис. 12, a).
Согласно следствию второй аксиомы,
п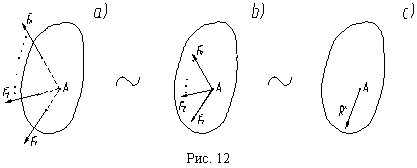 ереносим
все силы системы в точку пересечения
линий действия A и получаем систему
сил, приложенных в одной точке (рис. 12,
b). По аксиоме параллелограмма сил,
начиная с сил F1 и F2,
последовательно складываем силы,
добавляя каждый раз к полученной сумме
по одной силе системы. Дойдя до последней
силы Fn, выясняем, что
система сил (рис. 12, b) эквивалентна одной
силе или равнодействующей R*
(рис. 12, c), равной геометрической сумме
сил системы.
ереносим
все силы системы в точку пересечения
линий действия A и получаем систему
сил, приложенных в одной точке (рис. 12,
b). По аксиоме параллелограмма сил,
начиная с сил F1 и F2,
последовательно складываем силы,
добавляя каждый раз к полученной сумме
по одной силе системы. Дойдя до последней
силы Fn, выясняем, что
система сил (рис. 12, b) эквивалентна одной
силе или равнодействующей R*
(рис. 12, c), равной геометрической сумме
сил системы.
Таким образом, система сходящихся сил приводится к равнодействующей (эквивалентна равнодействующей), которая равна геометрической сумме сил системы и приложена в точке пересечения линий действия сил:
(F1, F2,...,Fn) ~ R*; R* = F1 + F2 + ... + Fn |
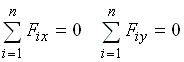
Для равновесия твердого тела под действием системы сходящихся сил необходимо и достаточно, чтобы геометрическая сумма всех сил системы была равна нулю:
|
для равновесия твердого тела под действием системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник системы был замкнутым.
Для равновесия твердого тела под действием системы сходящихся сил необходимо и достаточно, чтобы суммы проекций сил системы на оси координат были равны нулю.