

25. Схема управления реверсом асинхронного двигателя при питании от сети.
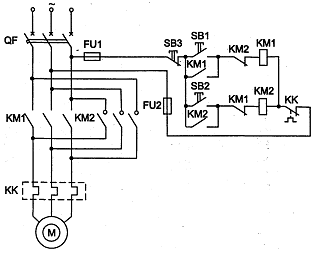
Схема позволяет осуществлять прямой пуск асинхронного короткозамкнутого двигателя, а также изменять направление вращения двигателя, т.е. производить реверс. Пуск двигателя осуществляется включением автоматического выключателя QF и нажатием кнопки SB1, вследствие чего контактор КМ1 получает питание, замыкает свои силовые контакты и статор двигателя подключается к сети. Для реверса двигателя необходимо нажать кнопку SB3. Это приведет к отключению контактора КМ1, после чего нажимается кнопка SB2 и включается контактор КМ2.
Таким образом, двигатель подключается к сети с изменением порядка чередования фаз, что приводит к изменению направления его вращения. В схеме применена блокировка от возможного ошибочного одновременного включения контакторов КМ2 и КМ1 с помощью размыкающих контактов КМ2, КМ1. Отключение двигателя от сети осуществляется кнопкой SB2 и автоматическим выключателем QF. В схеме предусмотрены все виды защит электродвигателя, рассмотренные в схеме управления асинхронным двигателем с нереверсивным магнитным пускателем.
26. Сельсин датчик, сельсин приёмник. Их схемные решения.
Сельсины представляют собой малогабаритные индукционные машины переменного тока. Наиболее широкое применение получили сельсины с одной однофазной обмоткой, другой – трёхфазной
В зависимости от выполняемых функций различают:
Сельсин – датчик (СД); вал сельсина датчика приводится в движение от механизма, угловое перемещение которого требуется подать дистанционно.
Сельсин – приемник (СП), ротор которого воспроизводит угловое перемещение ротора сельсин-датчика.
Сельсины работают всегда в паре (датчик – приёмник), при этом между ними существует только электрическая часть. Электрическую связь между датчиком и приёмником называют линией связи.
В системах автоматики сельсины работают в индикаторном или трансформаторном режимах.
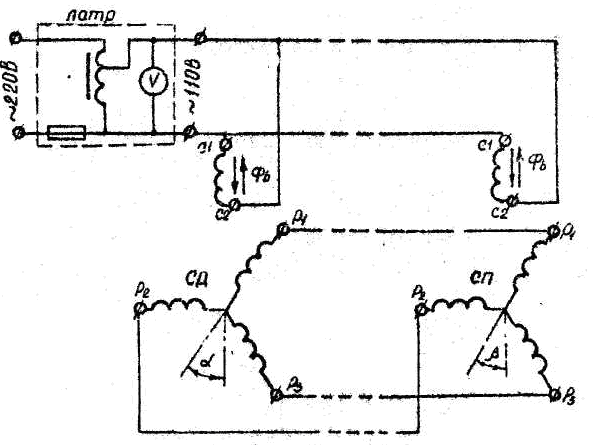
Индикаторный режим.
Под индикаторным режимом работы сельсинов понимают режим дистанционной передачи углового перемещения ротора СД при работе на стрелку, закрепленную на роторе СП с нулевым нагрузочным моментом на валу приемника.
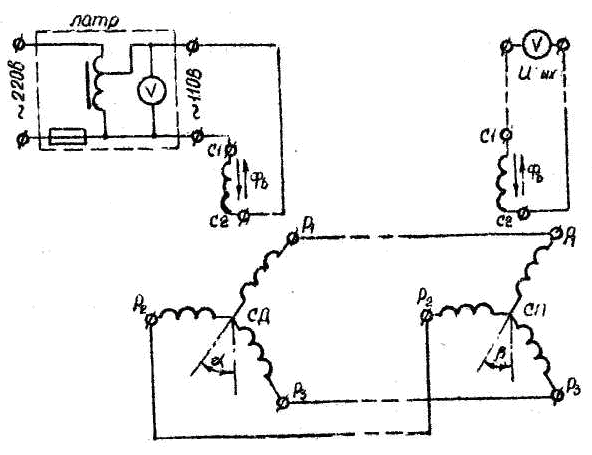
Трансформаторный режим.
Сельсины, работающие в трансформаторном режиме, применяются для дистанционного измерения рассогласования положений между задающей и исполнительной сети. Принципиальная схема включения сельсинной пары в трансформаторном режиме приведена на рисунке.
27. Основной признак замкнутой системы регулируемого признака(привода).
Основным признаком замкнутых структур является такое автоматическое управление электроприводом( ЭП), при котором ЭП наилучшим образом выполняет свои функции при всевозможных управляющих и внешних возмущениях, действующих на рабочую машину или ЭП. Идея замкнутых систем регулирования сводится к тому, что в системе автоматически компенсируются воздействия возмущающих факторов и угловая скорость или момент двигателя могут с большой точностью поддерживаться на требуемом уровне.
Обычно замкнутые структуры ЭП применяются в тех случаях, когда требуется обеспечить движение исполнительных механизмов рабочих машин с высокими показателями: большим диапазоном регулирования скорости и точностью её поддержания, заданное качество переходных процессов и точностью остановки, экономичностью или оптимальным функционированием технологического оборудования и самого ЭП.