

39. Амплитудное регулирование напряжения.
А мплитудное
регулирования напряжения.
мплитудное
регулирования напряжения.
В этом варианте оно состоит из управляемого тиристорного выпрямителя, фильтра, автономного инвертора. В такой схеме происходит раздельное регулирование U и f. В приводе с частотным управлением управляемый выпрямитель работает также как и в приводе постоянного тока. Автономный инвертор представляет собой реверсивный переключатель, который подключает нагрузку на постоянное напряжение, поочередно меняя полярность подключения. Для ПЧ необходимо, чтобы время работы ключей было одинаковым. Только в этом случае напряжение
на нагрузке будет представлять собой симметричные разнополярные импульсы. Вых. Напряжение АИН несинусоидально, поэтому необходимо принимать меры для уменьшения гармонической составляющей.В АИН применяются транзисторные и тиристорные ключи.
40. Метод эквивалентного тока.
Метод экв. тока. Основан на том, что проходящий в двигателе и изменяющийся по величине фактический ток заменяется в расчётах эквивалентным током Iэкв, который вызывает в ЭД те же потери, что и фактические.
 .
.
Метод предпочтителен для АД со значительной составляющей тока ХХ доходящий до 40-60% Iном. Iэкв сопоставляется с Iном выбранного двигателя и если Iэкв<Iном, то двигатель отвечает условиям нагрева.
41. Амплитудно-импульсное регулирование напряжения.
А мплитудно-импульсное
регулирование напряжения.
мплитудно-импульсное
регулирование напряжения.
Для амплитудно-импульсного регулирования напряжения используют неуправляемый выпрямитель:
Первый блок – это неуправляемый выпрямитель;
Второй блок – широтно-импульсный преобразователь;
Третий блок – автономный инвертор напряжения.
Напряжение сети выпрямляется, фильтруется и регулируется с помощью ШИП. На его выходе формируются прямоугольные импульсы, поэтому ставится дополнительно фильтр для сглаживания высокочастотных пульсаций U. Звено постоянного тока структурно более сложное, но число силовых тиристоров меньше. Регулирование частоты осуществляется АИН. Т.о. в преобразователях частоты этого типа частота и напряжение регулируется отдельно.
42. Метод эквивалентного момента.
Для
проверки двигателя по нагреву часто
пользуются графиками момента, а величина
экв. момента определяется:
 .
Мэкв сопоставляется с Мном двигателя.
Если Мэкв<Мном, то двигатель отвечает
условиям нагрева. Метод применяется
для АД, работающих в пределах устойчивой
части мех. хар-ки.
.
Мэкв сопоставляется с Мном двигателя.
Если Мэкв<Мном, то двигатель отвечает
условиям нагрева. Метод применяется
для АД, работающих в пределах устойчивой
части мех. хар-ки.
43. Управляемые и неуправляемые выпрямители для регулирования частоты.
Для
управления ДПТ средней и большой мощности
чаще всего используют управляемые
выпрямители, выполненные по трехфазной
мостовой схеме. Рассмотрим схему
управления приводом по системе УВ – Д
с подчинённым регулированием и
последовательной коррекцией. В этой
схеме якорь двигателя М получает питание
от непрерывного тиристорного выпрямителя,
выполненного по мостовой схеме. На одном
валу с двигателем установлен тахогенератор,
который осуществляет отрицательную
обратную связь. Сигнал этой связи
пропорционален угловой скорости
двигателя: .
Задающий сигнал поступает от бесконтактного
командо – контроллера через задатчик
интенсивности. Рассматриваемая схема
явл. двухконтурной, кроме внешнего
контура регулирования скорости имеется
внутренний замкнутый контур регулирования
тока, который потребляет якорь двигателя.
Сигнал ООС по току
.
Задающий сигнал поступает от бесконтактного
командо – контроллера через задатчик
интенсивности. Рассматриваемая схема
явл. двухконтурной, кроме внешнего
контура регулирования скорости имеется
внутренний замкнутый контур регулирования
тока, который потребляет якорь двигателя.
Сигнал ООС по току
 снимается с датчика тока. Этот сигнал
подаётся на вход регулятора тока РТ и
вычитается из сигнала на выходе регулятора
скорости РС, поэтому выходной сигнал
РС явл. задающим для РТ. На выходе РТ
формируется сигнал Uу,
который подаётся в систему БУТ тиристорного
управления выпрямителя. Для ограничения
тока якоря при пуске в цепь обратной
связи регулятора скорости установлен
стабилитрон VT.
снимается с датчика тока. Этот сигнал
подаётся на вход регулятора тока РТ и
вычитается из сигнала на выходе регулятора
скорости РС, поэтому выходной сигнал
РС явл. задающим для РТ. На выходе РТ
формируется сигнал Uу,
который подаётся в систему БУТ тиристорного
управления выпрямителя. Для ограничения
тока якоря при пуске в цепь обратной
связи регулятора скорости установлен
стабилитрон VT.
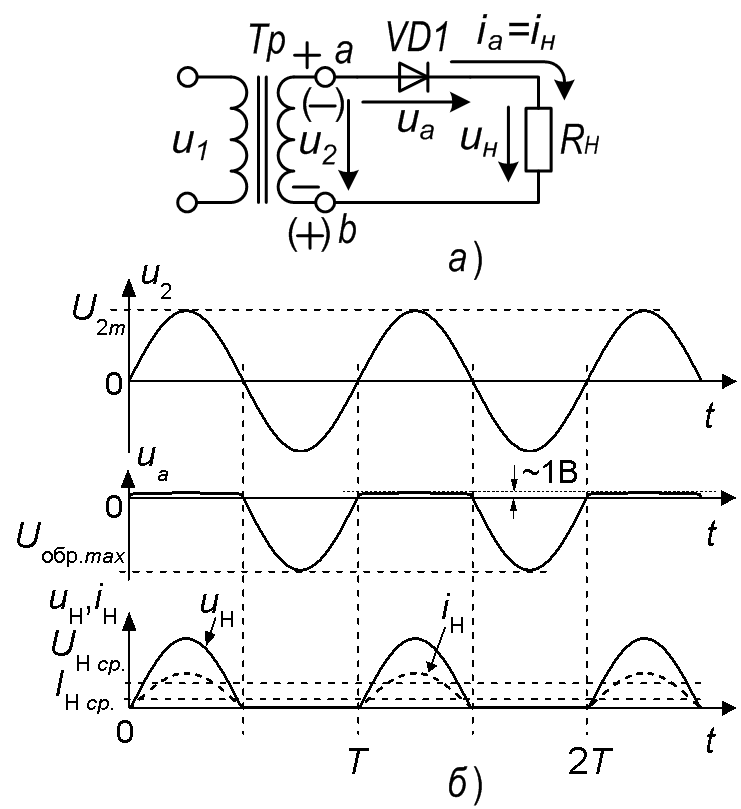
Вентильный блок обеспечивает однонаправленное протекание тока в нагрузке (выпрямляет переменное напряжение). Выпрямители, как однофазные, так и трёхфазные, могут быть однополупериодными и двухполупериодными. Схема однополупериодного выпрямителя приведена на рис.1.
|
Рис.1. Схема однополупериодного выпрямителя
|
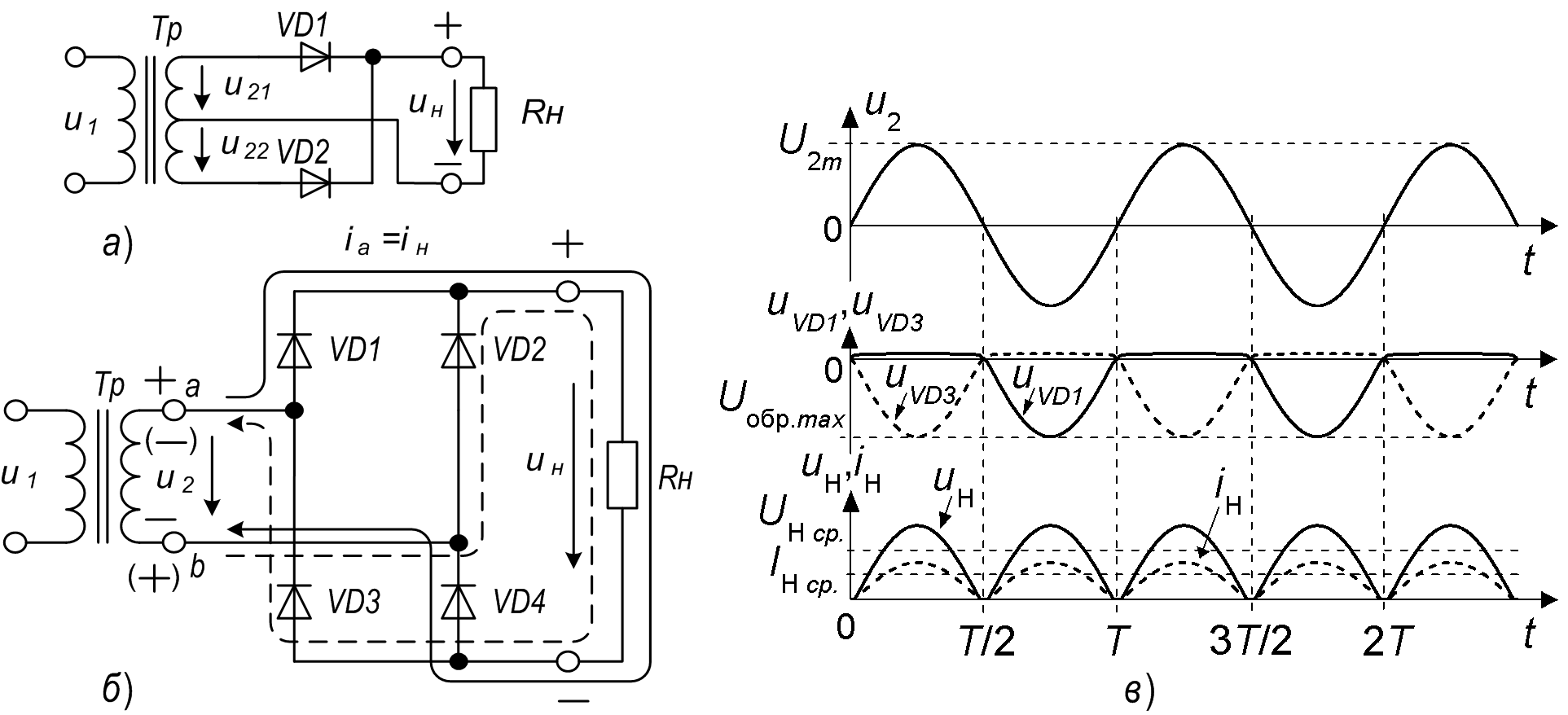
К двухполупериодным относятся выпрямитель с отводом от средней точки и мостовой выпрямитель
|
Рис. 2. Схемы двухполупериодных выпрямителей – с отводом от средней точки (а), мостового (б)
|
Трёхфазная нулевая (с отводом от нулевой точки) схема выпрямителя (рис.3а) является однополупериодной. Трёхфазная мостовая схема (т.н. схема Ларионова) (рис.3б), являясь двух-полупериодной, обеспечивает на выходе практически постоянное напряжение.
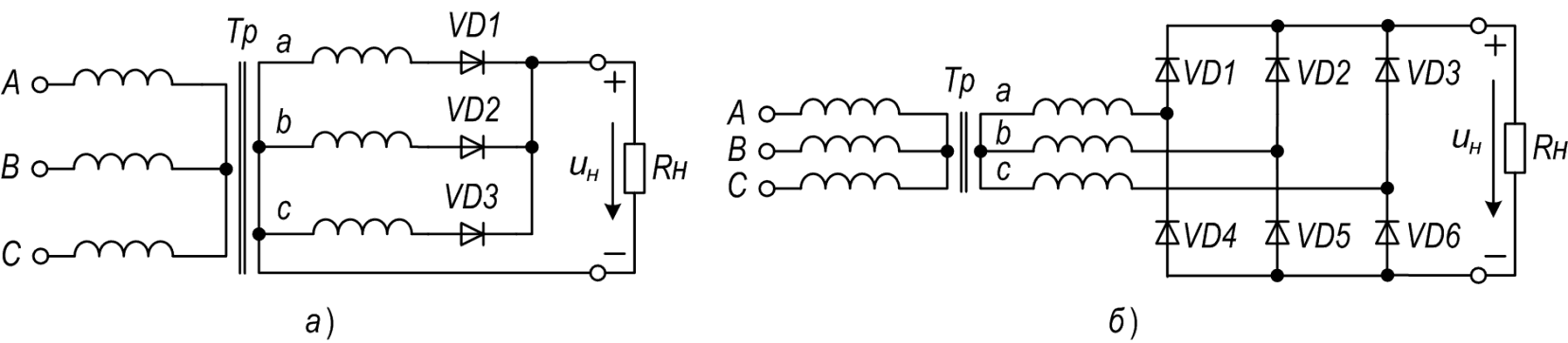
Рис. 3. Схемы трёхфазных выпрямителей – с отводом от нулевой точки (а); мостовая (б)