

9. Уравнение движения электропривода.
Уравнение движения ЭП должно учитывать все силы и моменты, действующие в переходных режимах. Уравнение движения ЭП рассмотрим при поступательном и вращающем движении. В 1-ом случае уравнение равновесия сил записывается в виде:
F-Fc=m*dv/dt – при поступательном движении движущая сила F уравновешивается силой сопротивления машины Fc и инерционной силой m*dv/dt, возникающей при изменении v.
При вращательном движении уравнение равновесия моментов: M-Mc=J*dw/dt –развиваемый двигателем вращающий момент М уравновешивается моментом сопротивления Мс на его валу и инерционным моментом J*dw/dt.
При М>Mc, тогда dw/dt>0– ускорение движения
При М<Mc, тогда dw/dt<0 – замедление движения
При М=Мс, dw/dt=0– установившийся режим.
В общем виде уравнение записывается так: +-М+-Мс=J*dw/dt
M-момент на валу двигателя, Мс-момент сопротивления, J- момент инерции, dw- угловая скорость. Выбор знаков у моментов зависит от режима работы двигателя и характера момента сопротивления.
10. Особенности и характеристики следящего привода.
Следящий ЭП представляет собой замкнутую автоматическую систему, при помощи кот исполнительный орган с определенной точностью отрабатывает движения рабочего механизма в соответствии с произвольно меняющимся сигналам, задаваемый управляющим органом, датчиком.
По способу действия системы управления следящие ЭП делятся:
1) следящие ЭП с релейным или прерывистым управлением: релейные и импульсные;
2) следящие ЭП с непрерывным управлением.
ЭП с релейным управлением отличается тем, что U на исполнит двигатель подается только в том случае, когда угол рассогласования достигает определенного значения. До этого значения двигатель неподвижен. Угловая скорость и ускорение двигателя после его включения не зависят от угла рассогласования, а определяются только параметрами самого ЭП (вращающий момент, момент инерции). В таких ЭП используют релейно-контактные аппараты или бесконтактные устройства с релейной характеристикой.
Импульсный следящий ЭП отличается тем, что управляющее воздействие на двигатель подается в виде импульсов U. Амплитуда, частота импульсов изменяется от сигнала рассогласования.
В ЭП непрерывного действия управление двигателя исполнит органа происходит непрерывно с ростом угла рассогласования.
Основная характеристика следящего привода. Следящий электропривод структурно отличается от регулируемого привода наличием контура ОС по перемещению. Скорость ЭД в таком приводе пропорциональна рассогласованию. В связи с этим, его называют приводом с пропорциональным управлением. Основной характеристикой следящего привода является ошибка положения между заданным и реальным углами: ε=φз-φ. (в идеальном случае ε=0) это ошибка углового положения вала ЭД.
Также для следящего привода характерны: высокая точность отработки; устойчивая работа привода во всём диапазоне скоростей; малое время переходного процесса; простота и надёжность в эксплуатации.
11. Механические характеристики двигателя постоянного тока с независимым возбуждением.
П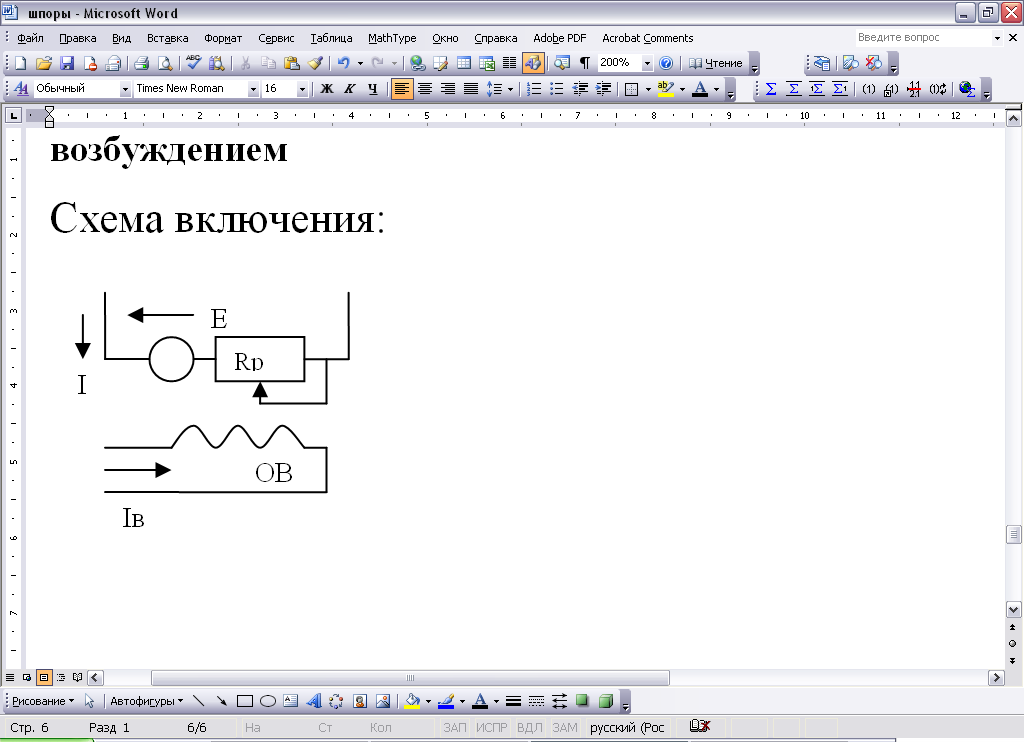 итание
схемы получают от разных источников,
независимых друг от друга. Электр.
энергия преобразуется в механическую,
мощность кот: P=M*w. Зависимость моментом
и его угловой частотой определяется
его мех. характеристикой. Аналитическое
выражение мех. характеристики двигателя
получается из уравнения равновесия
напряжения, составленное для якорной
цепи. При установившемся движении работы
двигателя, приложенное к нему U
уравновешивается падением напряжения
в якорной цепи и наведенной в якоре ЭДС
вращения: U=E+IR, где R=Rя+Rр. ЭДС равно E=kФw,
где k- конструктивный коэффициент
двигателя – k=pN/2πa, где p- число пар
полюсов; N-число проводников; а- число
параллельных ветвей обмотки двигателя;
Ф- магнитный поток; w- угловая частота.
Подставим: U=IR+kФw, w=(U-IR)/kФ. Эта зависимость
скорости движения от тока в якорной
цепи w=f(I). Момент двигателя связан с
током якоря и магнитным потоком – M=kФI.
Отсюда I=M/kФ. w=U/kФ-MR/k^2Ф^2. Если kФ=С, то
w=U/С-MR/С2. Это уравнение мех. характеристики.
С принимается постоянным, независящим
от нагрузки.
итание
схемы получают от разных источников,
независимых друг от друга. Электр.
энергия преобразуется в механическую,
мощность кот: P=M*w. Зависимость моментом
и его угловой частотой определяется
его мех. характеристикой. Аналитическое
выражение мех. характеристики двигателя
получается из уравнения равновесия
напряжения, составленное для якорной
цепи. При установившемся движении работы
двигателя, приложенное к нему U
уравновешивается падением напряжения
в якорной цепи и наведенной в якоре ЭДС
вращения: U=E+IR, где R=Rя+Rр. ЭДС равно E=kФw,
где k- конструктивный коэффициент
двигателя – k=pN/2πa, где p- число пар
полюсов; N-число проводников; а- число
параллельных ветвей обмотки двигателя;
Ф- магнитный поток; w- угловая частота.
Подставим: U=IR+kФw, w=(U-IR)/kФ. Эта зависимость
скорости движения от тока в якорной
цепи w=f(I). Момент двигателя связан с
током якоря и магнитным потоком – M=kФI.
Отсюда I=M/kФ. w=U/kФ-MR/k^2Ф^2. Если kФ=С, то
w=U/С-MR/С2. Это уравнение мех. характеристики.
С принимается постоянным, независящим
от нагрузки.
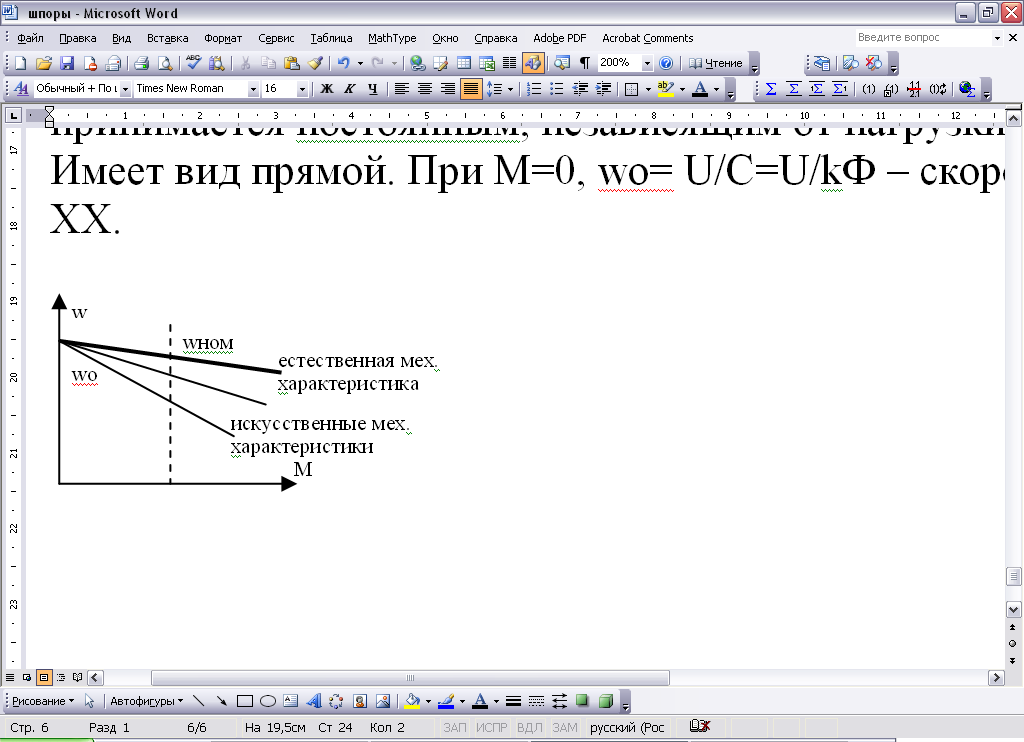
Имеет вид прямой. При М=0, wo= U/C=U/kФ – скорость вращения идеального ХХ.