

5.3. Простой рефлексный агент. Алгоритм работы агента. Описание агента для задачи
Уборки мусора.
Простейшим видом агента является простой рефлексный агент (рис. 2). Подобные агенты выбирают действия на основе текущего акта восприятия, игнорируя всю остальную историю актов восприятия. Простые рефлексные агенты характеризуются той замечательной способностью, что они чрезвычайно просты, но зато обладают ограниченным интеллектом.
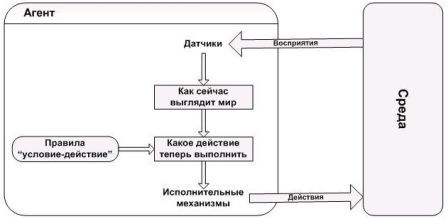
Рис. 2. Схематическое изображение структуры простого рефлексного агента.
Простые рефлексные агенты характеризуются той замечательной особенностью, что они чрезвычайно просты, но зато обладают весьма ограниченным интеллектом. Агент, программа которого приведена в листинге, работает, только если правильное решение может быть принято на основе исключительно текущего восприятия, иначе говоря, только если среда является полностью наблюдаемой. Внесение даже небольшой доли ненаблюдаемости может вызвать серьезное нарушение его работы. Например, в приведенном выше правиле торможения принято предположение, что условие car-in- front-is-braking может быть определено из текущего восприятия (текущего видеоизображения), если движущийся автомобиль имеет тормозной сигнал, расположенный на центральном месте среди других сигналов. К сожалению, некоторые более старые модели имеют другие конфигурации задних фар, тормозных сигналов, габаритных огней, сигналов торможения и сигналов поворота, поэтому не всегда возможно определить из единственного изображения, тормозит ли этот автомобиль или нет. Простой рефлексный агент, ведущий свой автомобиль вслед за таким автомобилем, либо будет постоянно тормозить без всякой необходимости, либо, что еще хуже, вообще не станет тормозить.
Возникновение аналогичной проблемы можно обнаружить и в мире пылесоса. Предположим, что в простом рефлексном агенте-пылесосе испортился датчик местонахождения и работает только датчик мусора. Такой агент получает только два возможных восприятия: [Dirty] и [Clеаn]. Он может выполнить действие Suck в ответ на восприятие [Dirty], а что он должен делать в ответ на восприятие [Clean]? Выполнение движения Left завершится отказом (на неопределенно долгое время), если окажется, что он начинает это движение с квадрата А, а если он начинает движение с квадрата в, то завершится отказом на неопределенно долгое время движение Right. Для простых рефлексных агентов, действующих в частично наблюдаемых вариантах среды, часто бывают неизбежными бесконечные циклы. Выход из бесконечных циклов становится возможным, если агент обладает способностью рандомизировать свои действия (вводить в них элемент случайности). Например, если агент-пылесос получает результат восприятия [Clean], то может подбросить монету, чтобы выбрать между движениями Left и Right. Легко показать, что агент достигнет другого квадрата в среднем за два этапа. Затем, если в этом квадрате имеется мусор, то пылесос его уберет и задача очистки будет выполнена. Поэтому рандомизированный простой рефлексный агент может превзойти по своей производительности детерминированного простого рефлексного агента.