

20. Сферическое движение твёрдого тела. Задание движения
Определение: сферическим движением твердого тела называют движение
твердого тела, одна из точек которого во все время движения остается
неподвижной. При таком движении все остальные точки тела движутся по
сферическим поверхностям, центры которых совпадают с неподвижной точкой.
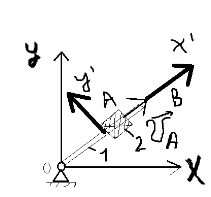
Движение тела определяет треугольник OAB, но его вершина O неподвижна,
а стороны постоянны.
Следовательно, в сферическом движении изменяется только положение
плоскости треугольника OAB и для задания движения нам нужно определить
положение этой плоскости в неподвижной системе координат Oxyz . Точки A и B
кинематической модели мы можем выбирать произвольно, выбираем их так, чтобы
угол AOB = π / 2. Через эти точки проводим оси Ox1 и Oy1, а ось Oz1 проводим так,
чтобы система координат Ox1y1z1 была правой.
В результате мы получили связанную с твердым телом систему координат, которая
полностью определяет плоскость треугольника OAB. Ее оси Ox1, Oy1 и их
единичные векторы i1, j1 лежат в плоскости треугольника, а ось Oz1, вернее,
ее единичный вектор k1, показывает верх этой плоскости.
Таким образом, для задания сферического движения твердого тела нужно
определить положение или ориентацию связанной системы координат
Ox1y1z1 в неподвижной системе координат Oxyz.
21. .Сферическое движение твёрдого тела. Распределение скоростей и
ускорений точек тела.
Определение: сферическим движением твердого тела называют движение
твердого тела, одна из точек которого во все время движения остается
неподвижной. При таком движении все остальные точки тела движутся по
сферическим поверхностям, центры которых совпадают с неподвижной точкой.
Зная положение мгновенной оси вращения и угловую скорость тела, можно
определить скорость любой точки тела М как скорость этой точки во вращательном
движении вокруг мгновенной оси по известной формуле
V = w * r , где V — скорость точки, w — угловая скорость , r — радиус-вектор точки,
проведенный из неподвижной точки О.
Таким образом, распределение скоростей точек тела в данный момент времени t при
сферическом движении по отношению к мгновенной оси вращения не отличается от
распределения скоростей при вращении тела вокруг неподвижной оси.
Для вычисления ускорения какой-либо точки тела при сферическом движении
воспользуемся векторным выражением скорости этой точки V = w * r

но

тогда

здесь E * R = WЕВРАЩ — вращательное ускорение точки.
W * V = W центрст — центростремительное ускорение точки
Таким образом, W = W вращ + W центр
22.Сложное движение точки. Основные определения
Определение: Сложным назыв. Движение точки, наблюдаемое
Одновременно подвижной и неподвижной системах отсчёта.
Определение: Абсолютное движение точки – движение точки
относительно неподвижной с\о. ( криволинейное )
Определение: Относительное движение точки – движение точки
относительно подвижной с\о.
Определение: Переносное движение – движение подвижной с\о
Относительно неподвижной.
Рассмотрим движение точки одновременно в двух с\о подвижной
и неподвижной
В рассматриваемом примере абсолютное движение – криволинейное,
относительно движение – прямолинейное , переносное движение –
вращательное ( т. О – центр вращения )
23. Сложное движение точки. Теорема о сложении скоростей.
Определение ( 2 черты ) : Абсолютная скорость точки равна геометр. Сумме
относительной и переносной скоростей. ( V = Vr + Ve ) - векторы
Определение ( 1 черта ) : Абсолютная скорость – скорость точки, относительно
неподвижной с\о ( V )
Определение ( 1 черта ) : Относительная скорость – скорость точки, относительно
подвижной с\о ( Vr )
Определение ( 1 черта ): Переносная скорость – это скорость той точки подвижной
с\о, с которой в рассматр. Момент времени совпадает движущая точка. ( Ve )

Ve зависит от R вращения.
Ve1 < Ve2 < Ve3
24. Сложное движение точки. Теорема сложения ускорений.
Определение ( 2 черты ) : Абсолютное ускорение точки равно геометрической
сумме относительного, переносного и кариолевского ускорений.
( W = Wr + We +Wc ( векторы) )
Определение ( 1 черта и далее ) : Абсолютное ускорение точки – ускорение точки
относительно неподвижной с\о. ( W )
Определение : Относительное ускорение точки – это ускорение точки относительно
подвижно с\о ( Wr )
Определение : Переносное ускорение точки – это ускорение той точки подвижной
с\о, с которой в рассматр. Момент времени совпадает движущая точка. ( We )
Определение: Кариолесово ускорение – это поворотное ускорение, равной
Двойному Векторному произведению векторов угловой скорости переносного
движений и относительной скорости.
( Wc = 2 * We(омега) * Vr * sin ( угл между We и Vr )
Согласно формуле , вектор Wc направлен перпендикулярно плоскости , в которой
расположены вектора We(омега) и Vr, так , чтобы глядя с острия этого вектора
видеть кратчайший поворот вектора We(омега) к вектору Vr, происходящим против
хода часовой стрелки.
Определение ( 1 черта ) : вектор We ( омега ) направлен вдоль сои вращений , так ,
чтобы глядя с острия этого вектора видеть вращение тела, происходящие против
хода часовой стрелки.
Формулы:






