

1. Способы задания движения точки.
Определить движ. точки- значит определить ее положение относительно выбранной системы отсчета в любой момент времени. Это делается одним из следующих способов.
А) Естественный способ определения движения точки требует задания ее траектории относительно выбранной системы отсчета xyz (рис.36).
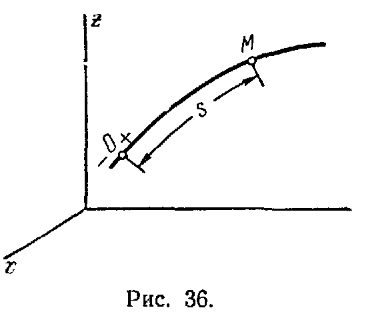
на траектории следует задать начало и положительное направление отсчета расстояний s=OM; расстояние s от начала отсчета О до точки М, измеренное вдоль дуги траектории и взятое с соответствующим знаком, будет однозначно определять положение точки М на траектории, а следовательно и в системе отсчета xyz. Далее должно быть указано начало отсчета времени (начальный момент t=0). Тогда движение точки будет определено, если для каждого момента времени t будет известна величина s, указывающая положение точки, т.е. если будет дана зависимость s=f(t) (1). Равенство (1) это закон движение точки.
При естественном способе опред-ния движ-ия точки должны быть заданы
Траектория точки
Начало отсчета расстояний на траект-ии с указанием положительного направления отсчета и начальный момент времени
Закон движения точки вдоль траектории в виде s=f(t)
По самой природе движение функция f(t) должна быть:
Однозначной, ибо в один и тот же момент времени движущаяся точка не может находиться в двух различных точках пространства;
Непрерывной, ибо движение непрерывно и поэтому каждому бесконечно малому изменению t соответствует бесконечно малое изменение s.
Дифференцируемой , т.е. должна пропускать производную.
Если s=c=const, то это означает, что точка относительно данной системе отсчета находится в покое
Б) Координатный способ определение движение точки состоит в том ,что даются: 1) какая- либо система координат (система ориентировки), связанная с телом отсчета, и 2) координаты движущейся точки, как функция времени.
Положение точки
в пространстве трех измерений определяется
тремя числами
 ,
которые называются криволинейными
координатами точки. Следовательно,
закон движение точки будет в общем
случае задаваться уравнениями
,
которые называются криволинейными
координатами точки. Следовательно,
закон движение точки будет в общем
случае задаваться уравнениями
 (2). Чаще всего для определения положения
точки используется прямоугольная
декартовая система координат xyz.
В этой системе координат движение точки
задается в виде x=x(t),
y=y(t),
z=z(t)
(3). Каждое из трех уравнений (3), взятое
отдельно, определяет закон движения
проекции точки на соответствующую ось;
считают, что при этом способе задания
исследуемое движение разлагается по
направлениям осей координат и
представляется как совокупность 3-х
движений вдоль этих взаимно перпендикулярных
осей.
(2). Чаще всего для определения положения
точки используется прямоугольная
декартовая система координат xyz.
В этой системе координат движение точки
задается в виде x=x(t),
y=y(t),
z=z(t)
(3). Каждое из трех уравнений (3), взятое
отдельно, определяет закон движения
проекции точки на соответствующую ось;
считают, что при этом способе задания
исследуемое движение разлагается по
направлениям осей координат и
представляется как совокупность 3-х
движений вдоль этих взаимно перпендикулярных
осей.
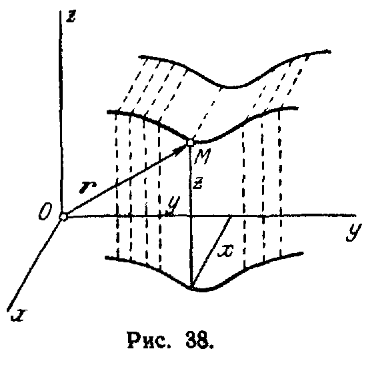
В) Векторный способ определения движение точки основан на задании ее положение радиусом- вектором r, проведенным из начала О выбранной системы ориентировки (см. рис. 38). Так как r=xi+yj+zk ,то в векторной форме закон движение точки представится в виде r=r(t)=x(t)i+y(t)j+z(t)k (5)
Траекторией точки при векторном задании движения будет годограф радиус вектора r (см. рис. 38).
В случае
плоского движения, т. е. когда траектория
есть плоская кривая, закон движения
точки относительно какой-либо системы
координат, расположенной в плоскости
движения, выразится только двумя
уравнениями. В частности, в случае
плоской декартовой системы координат
(ху) будем иметь: x=x(t),
y=y(t)
(6), а в случае плоской полярной системы
координат (r, )
(см. рис. 53)
)
(см. рис. 53)
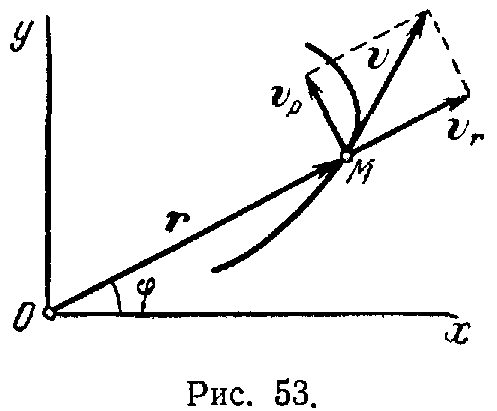
r=r(t),
 (7)
где r
— полярный радиус.
(7)
где r
— полярный радиус.
Векторное выражение закона плоского движения будет; r=r(t)=x(t)i+y(t)j (8)
где г — полярный радиус.
Исключая t в системах (6) или (7), получим уравнения траектории плоского движения в декартовых координатах: f(x,y)=0, или в полярных Ф(r , )=0. По характеру траектории движение точки может быть прямолинейным и криволинейным, причем эти свойства траектории ,конечно , зависят от выбора системы отсчета. Движение, прямолинейное относительно одной системы отсчета, может быть криволинейным относительно другой, и наоборот.