

16. Сложное движение точки
Законы Ньютона сформулированы для движения точки по отношению к инерциальным системам отсчета. Для определения кинематических параметров точки при движении относительно произвольно движущейся системы отсчета вводится теория сложного движения.
Сложным называют движение точки по отношению к двум или нескольким системам отсчета.
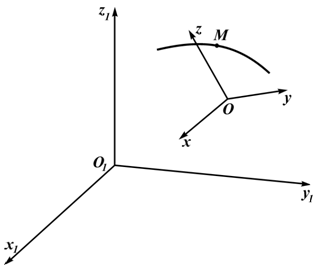
Рисунок 3.1
На рисунке 3.1 показаны:
- условно принимаемая за неподвижную система отсчета O1x1y1z1;
- движущаяся относи¬тельно неподвижной система отсчета Oxyz;
- точка M , перемещаю¬щаяся по отношению к под¬вижной системе отсчета.
Движение точки M в данном случае является сложным. Её движение по отношению к подвижной системе отсчета называют относительным движением.
Движение той точки подвижной системы отсчета, в которой в данный момент находится движущаяся точка, по отношению к неподвижной системе отсчета называют переносным движением. Движение точки M по отношению к неподвижной системе отсчета называют абсолютным движением.
По аналогии с этими определениями будут называться относительные, переносные и абсолютные скорости и ускорения точки. Для их обозначения в относительном движении часто всего используется индекс r (relative – относительный) -Vr, ar ; в переносном движении индекс e (entrained - увлекать за собой) -Ve , ae .
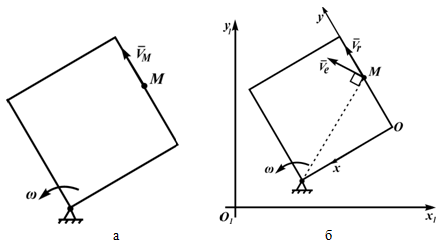
Рисунок 3.2
Ниже приведен пример сложного движения точки -M.
На рисунке 3.2,а показан квадрат, вращающийся в плоскости чертежа вокруг неподвижной точки. По стороне квадрата движется точка M. Она участвует в двух движениях, поэтому можно ввести две системы отсчета: неподвижную, например, O1x1y1z1 - по отношению к которой вращается квадрат и подвижную Oxyz , скрепленную с квадратом, по оси Oy которой движется точка M (рисунок 3.2,б).
Движение точки M по стороне квадрата (по оси Oy скрепленной с квадратом подвижной системы) является относительным - скорость в этом движении Vr . Вращение точки M вместе с квадратом - переносное движение, скорость в этом движении - Ve . Абсолютное движение является результатом сложения переносного и относительного движений.
17. Ускорение точки в сложном движении. Ускорение Кориолиса
Согласно теореме Кориолиса, абсолютное ускорение точки в сложном движении определяется как геометрическая сумма относительного, переносного и кориолисова ускорений (рис. 3)
aa = ar ⊕ ae ⊕ aC .
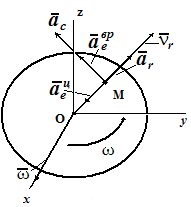 Рис.
3
Рис.
3
Поскольку, в данном случае, относительное движение происходит по прямой линии, относительное ускорение ar направлено вдоль этой прямой и определяется выражением
![]()
Переносным ускорением точки M является ускорение точки M диска. Диск совершает вращательное движение, следовательно, переносное ускорение определяется выражением
ae = aeвр ⊕ aeцс ,
где aeвр= ε⋅ OM - вращательное ускорение точки M, направленное перпендикулярно отрезку OM ;
aeцс= ω2⋅ OM - центростремительное ускорение точки M, направленное к центру диска.
Ускорение Кориолиса или поворотное ускорение определяется по формуле
aC = 2 ωe ⊗ νr ,
где ωe - переносная угловая скорость,
νr - относительная скорость точки.
Направление ускорения Кориолиса определяется по правилу векторного произведения или по правилу Жуковского.
Величина ускорения Кориолиса определяется выражением
aC = 2 ωe νr sinα ,
где α – угол между векторами ωe и νr .
Рассмотрим, какой физический смысл заложен в ускорение Кориолиса. Для простоты будем считать, что диск вращается с постоянной угловой скоростью, а точка M движется относительно диска с постоянной относительной скоростью (рис.4).
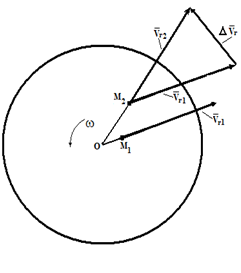 Рис.
4
Рис.
4
Пусть в момент времени t1 точка M занимала положение M1 и имела относительную скорость νr 1 . За промежуток времени Δt точка M переместится в положение M2 , при этом направление скорости νr изменится вследствие вращения диска. Вектор νr получит приращение Δνr . Отношение Δνr / Δt определяет среднее ускорение точки за промежуток времени Δt . Предел отношения Δνr / Δt при Δt→ 0 есть производная dνr / dt , как производная от вектора постоянного по величине.
Рассмотрим, как изменяется переносная скорость в зависимости от относительного движения. В моменты времени t1 и t2 переносная скорость определяется выражениями νe1= ω ⊗ OM1 и νe2= ω ⊗ OM2 . Тогда приращение вектора νe за счет относительного движения будет равно
Δνe = ω ⊗ OM2 - ω ⊗ OM1 = ω ⊗ (OM2 - OM1) = ω ⊗ νr⋅ Δt
Отношение Δνe / Δt в пределе при Δt→ 0 дает производную dνe / d t = ω ⊗ νr . Таким образом, ускорение Кориолиса с одной стороны характеризует изменение относительной скорости по направлению за счет переносного вращения и, с другой стороны, изменение величины переносной скорости за счет относительного движения.
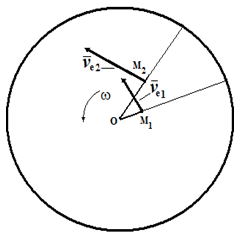
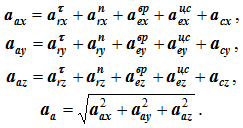
Рис. 5
Абсолютное ускорение точки в сложном движении в общем случае определяется геометрической суммой пяти слагаемых
![]()
Для определения величины абсолютного ускорения удобнее пользоваться аналитическим методом сложения векторов: