2.3. Выбор исполнительных механизмов и аппаратуры управления.
Исполнительные механизмы предназначены для перемещения регулирующего органа в схеме автоматического регулирования в соответствии с командным сигналом регулятора. Исполнительные механизмы подразделяются на однооборотные и многооборотные. Исполнительные механизмы выбираются в зависимости от вида регулирующего органа и в зависимости от усилий, необходимых для перемещения регулирующего органа, так как в качестве регулирующего органа в дипломном проекте используется заслонка и, для неё выбирается однооборотный исполнительный механизм.
Так как на паропроводе стоит заслонка, которая регулирует подачу пара в камеру , исполнительным механизмом необходимо управлять. для управления заслонкой выбираю исполнительный механизм МЭО - 630/25- 0,63 с номинальным крутящим моментом на выходном валу 630Нм, номинальное время полного хода выходного вала 25 секунд, номинальный полный ход вала 0,63 оборота, тип электродвигателя ДАУ - 25П, потребляемая мощность 300 ВА.
Ключи
управления необходимо выбрать таким
образом, чтобы можно было работать в
автоматическом режиме и в случае выхода
регуляторов из строя осуществлять
дистанционное управление. В качестве
ключей «автомат -дистанция» используются
многопозиционные переключатели ПМОФ
45—
112222/1Д93
и в качестве клю чей
«больше- меньше» кнопки КМЕ 4511У2
красные-«больше», чёрные-«меньше».
чей
«больше- меньше» кнопки КМЕ 4511У2
красные-«больше», чёрные-«меньше».
Пускатели
предназначены для пуска исполнительного
механизма при поступлении сигнала с
регуляторов (при наличии рассогласования
на нём). В соответствии с этим выбираем
реверсивные бесконтактные пускатели
ПБР-2М,  так
как пускатели более надёжны по сравнению
с контактными, имеют небольшие размеры,
они так же менее инерционны. Питание
220 В, 50
Гц,
потребляемая мощность 7
ВА.
для контроля положений регулирующих
органов выбираю дистанционный указатель
положений типа ДУЛ —
М, питание 220 В, 50
Гц,
потребляемая мощность 5
ВА.
так
как пускатели более надёжны по сравнению
с контактными, имеют небольшие размеры,
они так же менее инерционны. Питание
220 В, 50
Гц,
потребляемая мощность 7
ВА.
для контроля положений регулирующих
органов выбираю дистанционный указатель
положений типа ДУЛ —
М, питание 220 В, 50
Гц,
потребляемая мощность 5
ВА.
2.4 Построение структурной схемы и определение передаточной функции системы управления
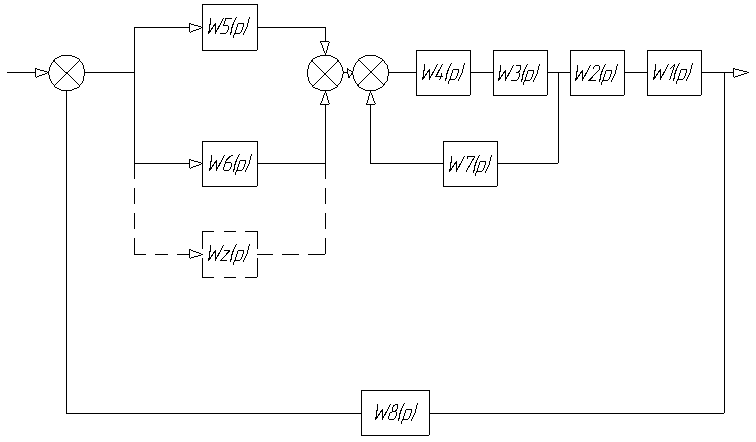
Управление можно показать структурной схемой, т. е. такой схемой, в которой каждой математической операции преобразования сигнала соответствует определенное звено. Любая структурная схема состоит из звеньев определенным образом соединенных между собой.
Таким образом, структурная схема автоматизации - это графическое изображение в виде прямоугольников и линий связи определенной совокупности типовых звеньев. Внутри прямоугольников указывается аналитическое выражение передаточной функции звена, полностью характеризующее его динамические свойства. Направление передачи сигнала обозначается стрелками.
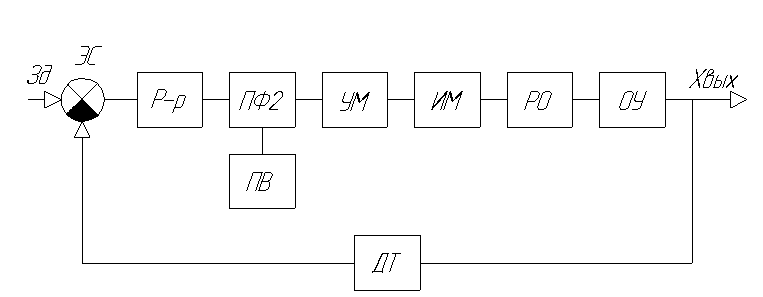
где: ОУ - объект управления;
РО - регулирующий орган;
ИМ - исполнительный механизм;
УМ
(ПБР) - усили тель
магнитный;
тель
магнитный;
ПФ2 - переключатель с фиксацией;
ПВ - переключатель с самовозвратом;
Р-р - регулятор;
ЭС - элемент сравнения;
Зд - задающее воздействие;
ДТ - датчик.
Совокупность блоков БР, УМ, ИМ, РО составляет регулирующее устройство. По условию задания регулирующее устройство должно формировать ПИ-закон регулирования.
В силу того, что требуемый закон регулирования формируется блоком БР, то для реализации регулирующего устройства с ПИ-законом регулирования необходимо, чтобы динамические характеристики блоков УМ, ИМ, РО соответствовали пропорциональным (усилительным) звеньям.
Это условие выполняется для блоков УМ и РО. Исполнительный механизм идентифицируется интегрирующим звеном. Для преобразования ИМ в усилительное звено его следует охватить отрицательной обратной связью
Динамические свойства датчика температуры однозначно определяются апериодическим звеном, а объект управления - последовательным соединением апериодического звена и звена с запаздыванием.
С учетом вышеизложенного структурная схема системы автоматизации, реализующей ПИ-закон регулирования, имеет вид, показанный на рисунке, на котором обозначено:
 -
объект управления;
-
объект управления;
 -
регулирующий орган;
-
регулирующий орган;
 -
исполнительный механизм;
-
исполнительный механизм;
 -
ПБР;
-
ПБР;
 -
П р-р;
-
П р-р;
 -
И р-р;
-
И р-р;
 -
ПИД закон регулирования;
-
ПИД закон регулирования;