

20. Евклидовы пространства. Определение, примеры
ОПР: скалярное произведение двух векторов а и b в линейном пространстве L над полем Р - действительное число. Обозначается (а, b) и удовлетворяет следующим аксиомам:
1 (а, b) = (b, а) для любого а, b принадлежащего L
2 ((а + b), с) = (а, с) + (b, с) для любых а,b,c принадлежащих L
3 ((αa), b) = α (а, b) для любого а, b принадлежащего L, для любого α принадлежащего R
4 (а, а) ≥ 0, (а, а)= 0 в том и только том случае, если а = 0
Пример 1.


Пример 2 c[a;b] – пространство непрерывных функций на [a;b]
Пример3 В пространстве Rn x=(α1….αn) и y=(β1…βn)
Опред. Линейное пр-во L над полем R наз Евклидовым, если в нём определена операция скалярного произведения.
Замечание. В пр-ве L над полем С также может быть введено понятие скалярного произведения со свойствами:
1)x*y = ( )
)
2) (x1+x2)y = (x1,y) + (x2,y)
3) (λx1;y) = λ(x1;y)
4)
(x;x)>=0, (x;x) = 0
x=
21. Свойства скалярного произведения, длина вектора, угол между векторами
Опред.
Скалярным произведением 2-х векторов
a,
b
в пр-ве над
над
 будем называть действительное число,
кот. уд . следующим аксиомам:
будем называть действительное число,
кот. уд . следующим аксиомам:




Длиной
вектора а в пр-ве
над
R
наз.
 ;
в
;
в
 :
:
 ;
C
;
C
 :
:
 .
.
Теорема. В любом
Евклидовом пр-ве справедливо нер-во
Каши-Буняковского


Следствие.

Углом
между векторами в произвольном Евклидовом
пр-ве наз. угол
,
 .
.
22. Ортонормированные системы векторов.
Опр.
1 вектора
a,b
в пр-ве
 наз
ортогональными, если
наз
ортогональными, если
 .
.
Лемма. Если некоторый вектор A ортогонален всем векторам пр-ва E, то это нулевой вектор.
 ,
,
 ,
,

1)Система
векторов a1,a2,
…,an(1)
называется ортогональной, если
(ai,…aj)=0(i=j);
(ai,ai)>0,
i=
2) система (1) называется ортонормированной, если она ортогональная и (ai,ai)=1, i=
Теорема. Ортогональные сис-мы ненулевых векторов линейно-независимы.
23.Метод ортогонализации Грамма – Шмидта.
Теорема: В n-мерном евклидовом пространстве существует ортонормированный базис.
Процесс построения ортогонального базиса к конечномерном Евклидовом пр-ве называется методом ортогонализации Грамма-Шмидта
В
пр-ве
 многочленов не выше 2-й степени, требуется
построить ортогональный базис a1=
многочленов не выше 2-й степени, требуется
построить ортогональный базис a1=
 на
на
 .*
.* *
*
 ,
,
Сис-ма: .
.
Эту систему можно нормировать
|b1|
=

|b2|=
|b3|= =
=

Ортонормированная
система e1= ;
e2=t
;
e2=t ;
e3=
;
e3=
24, 25. Выражение скалярного произведения через координаты перемножаемых векторов. Матрица Грамма
Теорема. Если векторы a и b заданы своими координатами:a={X1;Y1;Z1}, b={X2;Y2;Z2}, то скалярное произведение опред. Формулой
ab=X1X2+Y1Y2+Z1Z2.
Скалярное произведение двух векторов равно сумме попарных произведений соответствующих координат этих векторов.
Следствие1. Необходимым и достаточным условием перпендикулярности векторов a и b является равенство: X1X2+Y1Y2+Z1Z2=0
Следствие2.
Угол между векторами находится: cos
f=
Слдствие3. Прus=XcosJ+YcosB+ZcosY
Определителем
Грама системы векторов e1, e2,
..., en в евклидовом
пространстве называется определитель матрицы
Грама этой системы:
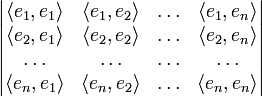
где ![]() — скалярное
произведение векторов ei и ej.
— скалярное
произведение векторов ei и ej.
Матрица Грама возникает из следующей задачи линейной алгебры:
Пусть в евклидовом пространстве V система векторов e1, e2, ..., en порождает подпространство U. Зная, чему равны скалярные произведения вектора x из U с каждым из этих векторов, найти коэффициенты разложения вектора x по векторам e1, e2, ..., en. Исходя из разложения x = x1e1 + x2e2 + ... + xnen получается линейная система уравнений с матрицей Грама:

Если базис ортонормированный, то матрица Грамма будет равна ед. матрице Е.
(x;y)=
При переходе к другому базису матрица Грамма является матрицей билинейной формы, меняется как матрица билинейной формы
Г’=T’ГT (T- матрица перехода от 1 базиса ко2)
Матрицу Грамма рассматривают не только для базисов, но и для произвольных наборов векторов.
Пусть матрица Грамма для a1….ak
Если векторы a1….ak – линейно независимы, то Г отлична от нуля.
Ранг Г равен количеству линейно-независимых векторов в системе a1….ak.
26. Нормированные векторные пространства Опр.: Говорят, что в линейном пр-ве L над полем R задана норма, которая каждому вектору х€L ставит в соответствие действительное число, которое обозначается так IIxII и удовлетворяет условиям: 1) IIλxII = λIIxII 2)IIxII ≥ 0, IIxII = 0 <=> x = 0 3)IIx+yII ≤ IIxII + IIyII – неравенство треугольника IIxII из пр-ва Rn может быть определена такая: х = (α1…αn), IIxII = max I IαiI
Опр.:
линейное пр-во, в котором введена норма
называется нормированным.
Теорема:
евклидово пр-во является нормированным,
если определить норму так IIxII
=
 Док-во:
первые 2 условия очевидны, докажем 3(н-во
треугольника); рассмотрим норму:
IIx
+ yII2
= (x+y,
x+y)
= (x,
x)+2(x,y)+(y,y)
≤ IIxII2
+ IIyII2
= (IIxII
+ IIyII)2
Следовательно,
IIx
+ yII2
≤ (IIxII
+ IIyII)2
, извлекая
корни, получим неравенство треугольника.
Док-во:
первые 2 условия очевидны, докажем 3(н-во
треугольника); рассмотрим норму:
IIx
+ yII2
= (x+y,
x+y)
= (x,
x)+2(x,y)+(y,y)
≤ IIxII2
+ IIyII2
= (IIxII
+ IIyII)2
Следовательно,
IIx
+ yII2
≤ (IIxII
+ IIyII)2
, извлекая
корни, получим неравенство треугольника.
27.
Ортогональные матрицы и их свойства
Матрица
U
называется ортогональной, если U-1
= UT
Свойства:
1)
det
U
= ±1
Док-во: det
(U-1U)=
det
E=1
det
(U-1U)=det(UTU)=(det
U)2
=1
det
U
= ±1
2) если U1
и U2
ортогональны, то U1U2
= U
также ортогональна
Док-во: U1
-1 = U1T
U2-1
= U2T
UUT
= U1U2
= (U1U2)T
= U1U2U2TU1T
= U1(U2U2-1)U1-1
=E
3)
если столбцы матрицы U
рассматривать как векторы из Rn,
то они образуют ортонормированный базис
со скалярным произведением, равным
сумме произведений соответствующих
координат
Док-во: UTU=E
∑Uki
Ukj
= δij
=
 Теорема:
матрица перехода от одного ортонормированного
базиса к другому ортогональна.
Док-во:
пусть Г, базис е1,е2…еn
Г ’ , e1‘,
e2’,…en’
тогда Г ‘ = ТТГ
Т
Г = Г ‘ = Е
ТТ
Е Т = Е
ТТТ
= Е => ТТ =
Т-1
Теорема:
матрица перехода от одного ортонормированного
базиса к другому ортогональна.
Док-во:
пусть Г, базис е1,е2…еn
Г ’ , e1‘,
e2’,…en’
тогда Г ‘ = ТТГ
Т
Г = Г ‘ = Е
ТТ
Е Т = Е
ТТТ
= Е => ТТ =
Т-1