

3. Регулирование скорости вращения двигателя постоянного тока независимого возбуждения.
Из
уравнения
![]() следует, что возможны три принципиально
различных способа регулирования скорости
вращения двигателя:
следует, что возможны три принципиально
различных способа регулирования скорости
вращения двигателя:
регулирование изменением тока возбуждения двигателя;
регулирование изменением сопротивления в цепи якоря;
регулирование изменением подводимого к двигателю напряжения.
3.1. Регулирование изменением тока возбуждения двигателя.
Регулирование скорости вращения двигателя изменением тока возбуждения является одним из наиболее простых и экономичных способов и находит широкое применение на практике.
Допустимая мощность двигателя при таком способе регулирования остаётся неизменной.
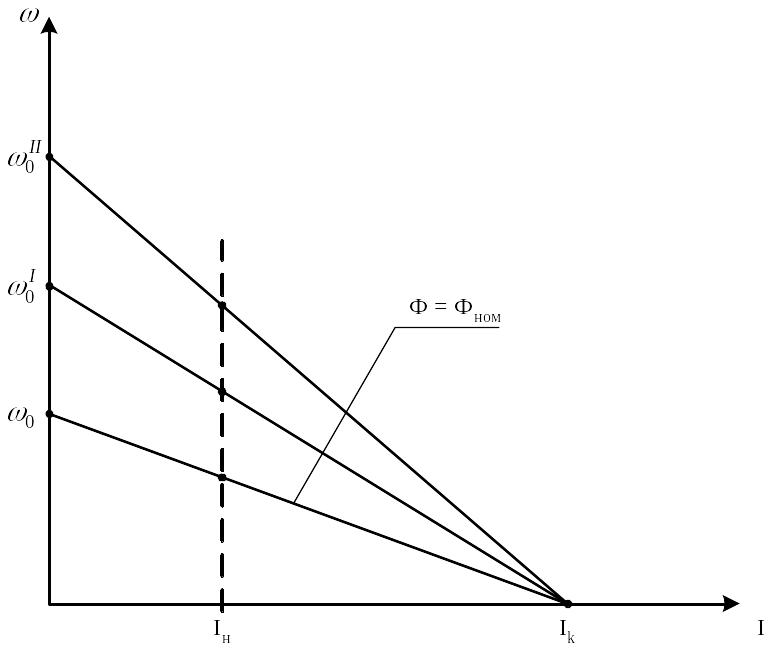
Рис. 3-1. Скоростные характеристики двигателя постоянного тока НВ при регулировании скорости изменением тока возбуждения.
При
![]()
![]() ,
откуда
,
откуда
![]() —
—
при любом значении тока возбуждения и при скорости вращения, равной нулю, ток якорной цепи равен току короткого замыкания двигателя.
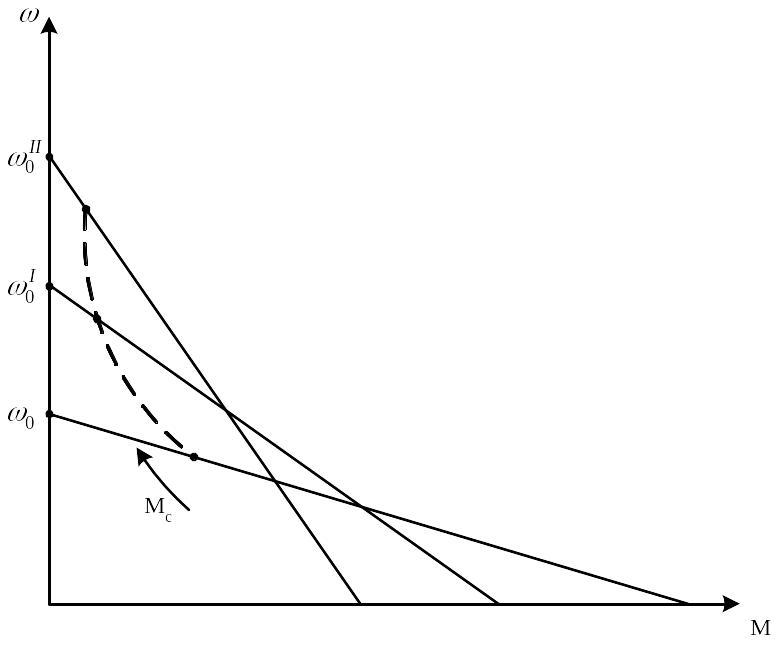
Рис. 3-2. Механические характеристики двигателя постоянного тока НВ при регулировании скорости изменением тока возбуждения.
Механические
характеристики имеют те же значения
скоростей идеального холостого хода
(![]() ),что
и для скоростных характеристик.
),что
и для скоростных характеристик.
Эти характеристики не пересекаются в одной точке, как скоростные, так как по мере уменьшения потока уменьшается и момент короткого замыкания, определяемый по формуле:
![]() .
.
Регулирование
является экономичным при постоянной
мощности, полному использованию двигателя
(наиболее экономичный режим) соответствуют
точки, находящиеся на линии номинального
тока
![]() .
Этому соответствуют точки, лежащие на
гиперболической кривой момента
сопротивления
.
Этому соответствуют точки, лежащие на
гиперболической кривой момента
сопротивления
![]() .
.
При работе на скоростях, соответствующих точкам, лежащим левее указанной кривой момента , двигатель будет недогружен. Напротив, работа на скоростях правее этой кривой приведёт к перегрузке двигателя.
При
постоянном моменте сопротивления (![]() )
и длительной нагрузке двигатель нужно
выбирать так, чтобы при наибольшей
скорости двигателя ток в цепи якоря не
превышал номинального.
)
и длительной нагрузке двигатель нужно
выбирать так, чтобы при наибольшей
скорости двигателя ток в цепи якоря не
превышал номинального.
3.2. Регулирование скорости изменением сопротивления якорной цепи.
При таком способе регулирования двигатель будет работать на одной из реостатных характеристик в зависимости от величины включенного в цепь якоря сопротивления.
Регулировочный реостат должен быть рассчитан на длительную работу с полным током нагрузки, поскольку его сопротивление оказывается включенным не только кратковременно во время пуска, но и во время работы двигателя на заданной скорости.
При таком способе регулирования изменяется жёсткость характеристики, а с ней и стабильность работы на заданной скорости. Полное использование двигателя по току достигается при регулировании с постоянным моментом.
При регулировании скорости вращения введением сопротивления в цепь якоря потери мощности в этих цепях изменяются пропорционально перепаду скорости.
Для двигателя постоянного тока потребляемая мощность в цепи якоря:
![]() или
или
![]() ,
отсюда
,
отсюда
![]() ,
или, обозначив
,
или, обозначив
![]() ,
получим
,
получим
![]() .
.
КПД привода при реостатном регулировании может быть ориентировочно определён по формуле:
![]() .
.