

2. Механические характеристики двигателя независимого возбуждения в тормозных режимах.
Очень часто в современных электроприводах необходимо быстро и точно остановить механизм или изменить направление его вращения. Скорость и точность, с которыми будут произведены эти действия, во многом определяют производительность механизма, а также качество изготавливаемого изделия.
Во время остановки или перемены направления движения электродвигатель работает в тормозном режиме на одной из характеристик, соответствующих осуществляемому способу торможения.

Рис. 2-1. Механические характеристики двигателя постоянного тока независимого возбуждения в различных режимах работы.
На рисунке показаны механические характеристики двигателя, характеризующие три возможных способа торможения:
генераторное торможение с отдачей энергии в сеть,
динамическое торможение,
торможение противовключением.
2.1. Генераторное торможение с отдачей энергии в сеть осуществляется в том случае, когда скорость двигателя оказывается больше скорости идеального холостого хода
![]() ,
,
а его ЭДС Е больше приложенного напряжения U.
Двигатель при этом работает в режиме генератора параллельно с сетью, которой он отдаёт электрическую энергию. Направление тока при этом изменяется на противоположное:
![]() .
.
Момент также изменяет своё направление действия:
![]() .
.
Обозначим тормозной момент
![]() и перепишем уравнение механической
характеристики двигателя:
и перепишем уравнение механической
характеристики двигателя:
![]() .
.
При
![]()
![]() — скорость идеального холостого хода.
— скорость идеального холостого хода.
(Аналогично:
![]() ,
,
![]() ,
k — наклон линии.)
,
k — наклон линии.)
Таким образом, наклон механической характеристики в режиме генераторного торможения с отдачей энергии в сеть будет таким же, как и в двигательном режиме, то есть механическая характеристика в таком режиме будет продолжением механической характеристики двигательного режима во II квадранте.
Этот способ торможения возможен, к примеру, при спуске груза и при некоторых способах регулирования.
Такой способ торможения весьма экономичен, но его применение возможно лишь в узких пределах ограничения скорости.
2.2. Динамическое торможение происходит при отключении якоря двигателя и переключении его на сопротивление (реостатное торможение).
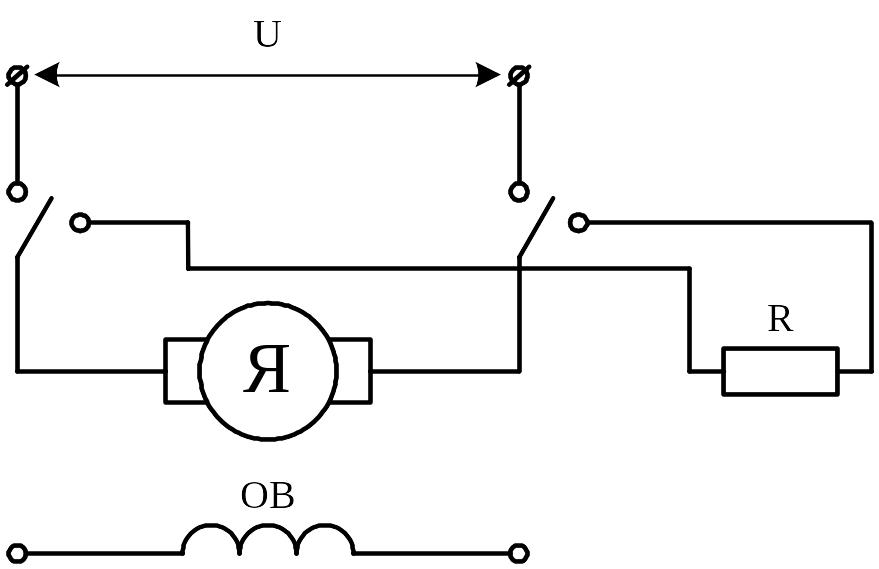
Рис. 2-2. Схема включения двигателя при динамическом торможении.
Режим динамического торможения также соответствует работе машины в качестве генератора. Однако этот режим отличается от приведённого выше тем, что вся кинетическая энергия запасённая и преобразованная двигателем в электрическую, не отдаётся обратно в сеть, а выделяется в виде тепла на сопротивлении R. ЭДС в этом случае сохраняет тот же знак, что и в двигательном режиме. Ток якоря:
![]() ,
,
где
![]() — сопротивление якорной цепи.
— сопротивление якорной цепи.
Тормозной момент при динамическом торможении может быть выражен равенством:
![]() .
.
В то же время из формулы
![]() ,
так как напряжение извне не прикладывается,
то
,
так как напряжение извне не прикладывается,
то
![]() ,
,
поэтому
![]() ,
тогда
,
тогда
![]() при Ф = const.
при Ф = const.
То есть
![]() .
.
При динамическом торможении механическая характеристика двигателя представляет собой прямую линию, проходящую через начало координат. Семейство характеристик динамического торможения при различных сопротивлениях якорной цепи ( ) расположены во II квадранте системы координат. Жёсткость характеристик уменьшается с увеличением сопротивления якорной цепи.
2.3. Торможение противовключением осуществляется в двух случаях:
когда обмотки двигателя включены для одного направления вращения, а якорь двигателя под воздействием внешних сил вращается в противоположную сторону;
при переключении обмотки якоря для быстрой остановки двигателя или изменения направления его вращения.
В первом случае
1) двигательный режим:
![]() (точка 1);
(точка 1);
2) двигатель остановлен:
![]() ,
,
![]() (точка 2);
(точка 2);
3) двигатель вращается в противоположном
направлении:
![]() (точка 3).
(точка 3).
Значительно чаще режим противовключения имеет место, когда изменяется полярность напряжения, подводимого к якорю электродвигателя при его вращении. ЭДС в этом случае направлена согласно с напряжением сети, а момент двигателя направлен против вращения якоря.