

1.2. Классификация механических характеристик.
Зависимость между скоростью вращения и моментом сопротивления механизма называется механической характеристикой механизма.
![]()
Для рассмотрения свойств механических характеристик можно воспользоваться упрощенной формулой, справедливой для большинства механизмов:
![]()
Исходя из этой формулы можно выделить четыре типа механических характеристик:
1) не зависящая от скорости механическая характеристика
![]() ,
,
2) линейно возрастающая механическая характеристика
![]() ,
,
3) нелинейно возрастающая характеристика (параболическая)
![]() — вентиляторная характеристика,
— вентиляторная характеристика,
4) нелинейно спадающая характеристика
![]()
![]() ,
,
![]() — обратно пропорционален скорости.
— обратно пропорционален скорости.

Рис. 1-4. Основные типы механических характеристик.
Механической характеристикой
электродвигателя называется зависимость
его скорости от вращающего момента, т.
е.
![]() .
.
П очти
все электродвигатели обладают тем
свойством, что скорость их является
убывающей функцией момента двигателя.
Это относится почти ко всем обычным
электродвигателям, применяемым в
промышленности. Однако степень изменения
скорости с изменением момента у разных
двигателей различна и характеризуется
так называемой жесткостью их
механических характеристик.
очти
все электродвигатели обладают тем
свойством, что скорость их является
убывающей функцией момента двигателя.
Это относится почти ко всем обычным
электродвигателям, применяемым в
промышленности. Однако степень изменения
скорости с изменением момента у разных
двигателей различна и характеризуется
так называемой жесткостью их
механических характеристик.
Механические характеристики электродвигателей можно разделить на три основные категории:
1. Абсолютно жесткая механическая характеристика, при которой скорость с изменением момента остается неизменной. Такой характеристикой обладают синхронные двигатели (прямая 1 на рис. 1-5).
2
Рис. 1-5. Механические характеристики
двигателей.![]() и генераторном
и генераторном
![]() режимах характеристика асинхронного
двигателя оказывается сравнительно
жесткой.
режимах характеристика асинхронного
двигателя оказывается сравнительно
жесткой.
3
Рис. 1-6. Механическая характеристика
асинхронного двигателя.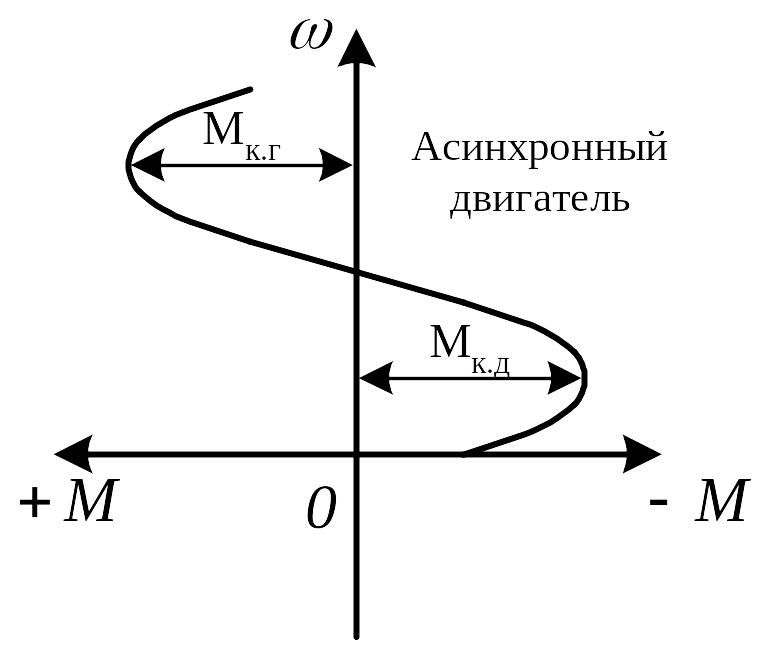
1.3. Механические характеристики двигателя постоянного тока независимого возбуждения.
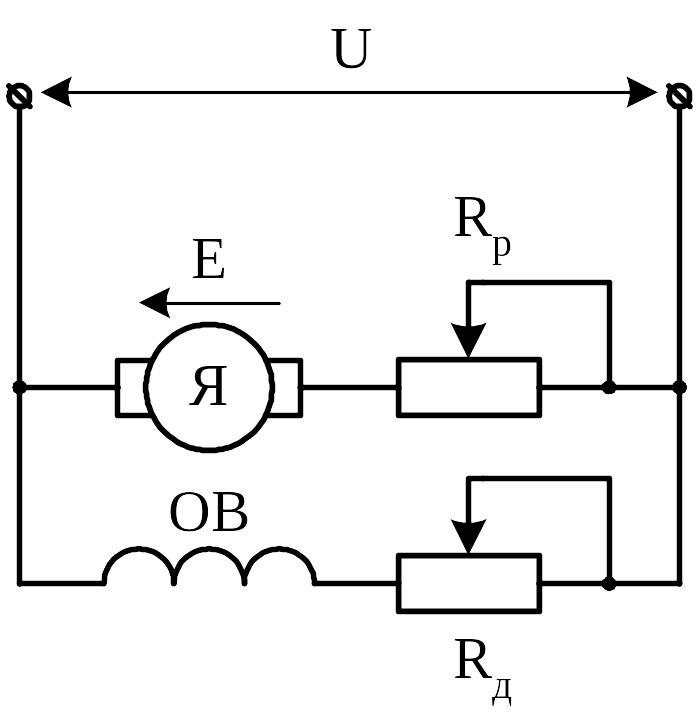
Рис. 1-7. Схема включения двигателя постоянного тока
независимого возбуждения.
В установившемся режиме работы двигателя приложенное напряжение U определяется последующему выражению:
![]() (1.1)
(1.1)
где Iя — ток якорной цепи,
![]() — суммарное сопротивление якорной
цепи,
— суммарное сопротивление якорной
цепи,
![]() .
.
Мгновенное значение ЭДС:
![]() ,
отсюда
,
отсюда
![]() ,
(1.2)
,
(1.2)
где С — конструктивный коэффициент,
![]()
N — число активных проводников обмотки якоря,
а — число пар параллельных ветвей обмотки якоря.
Подставив 1.2 в 1.1 получим:
![]()
![]() (1.3)
(1.3)
Выражение 1.3 (зависимость угловой скорости вращения от тока в якоре) принято называть скоростной характеристикой двигателя.
Для получения уравнения механической характеристики необходимо найти зависимость скорости вращения от момента двигателя.
Момент, развиваемый двигателем, связан с током якоря и магнитным потоком следующей зависимостью:
![]() (1.4)
(1.4)
отсюда
![]() (1.5)
(1.5)
Подставив формулу 1.5 в 1.3, получим:
![]() (1.6)
(1.6)
Выражение 1.6 — механическая характеристика двигателя.
Н а
рис. 1-8 представлены механические
характеристики двигателя независимого
возбуждения для различных сопротивлений
в якорной цепи. При М = 0 все
характеристики проходят через одну
точку, расположенную на оси ординат.
Скорость в этой точке называется
скоростью идеального холостого хода
(обозначается
а
рис. 1-8 представлены механические
характеристики двигателя независимого
возбуждения для различных сопротивлений
в якорной цепи. При М = 0 все
характеристики проходят через одну
точку, расположенную на оси ординат.
Скорость в этой точке называется
скоростью идеального холостого хода
(обозначается
![]() )
и определяется по формуле:
)
и определяется по формуле:
![]() (1.7)
(1.7)
В
Рис. 1-8. Механические
характеристики двигателей независимого
возбуждения
Естественной характеристикой называется такая характеристика двигателя, которая получается при отсутствии внешних сопротивлений в якорной цепи и номинальных значениях напряжения и магнитного потока.
Если в цепь якоря двигателя включено дополнительное сопротивление (реостат), то механические характеристики, получаемые при этом, называются искусственными или реостатными.
Реостатные характеристики имеют значительно больший наклон к оси моментов, чем у естественной характеристики, т.е. обладают меньшей жёсткостью. Чем больше введённое в цепь якоря сопротивление, тем круче идёт характеристика, тем меньше её жёсткость.