

Существует большое разнообразие систем управления (СУ), используемых в различных областях для контроля управления систем. Большую группу составляют управляющие системы пространственными координатами (навигационное, рулевое управление, измерительные и исполнительные устройства, устройства связи с объектом). Неотъемлемыми элементами современных систем являются микропроцессорные устройства. В качестве примера рассмотрим систему распределения пространственных координат.
![]()
ИУ – измерительное устройство, сравнивающее входную и выходную координаты и вырабатывающее сигнал ошибки. В СУ пространственными координатами ИУ – это измерительный преобразователь углов перемещения. Основывается на эффекте Холла.
П – преобразователь – электронная схема (аналоговое/цифровое устройство), преобразующая сигнал в форму, удобную для дальнейшей обработки.
УУ – усилительное устройство, - мощная электронная схема. В зависимости от целевого назначения системы выбирается тип усилителя.
Для усиления электрического сигнала в автоматике используется 3 типа усилителя: электрические, электромагнитное, магнитные. Основные параметры: магнитность, жесткость, входное/выходное сопротивление, линейность. Единственным источником энергии является исполнительное устройство. В зависимости от целевого назначения применяются пневмо-, гидро- и электроприводы.
Электрические машины.
Принцип действия всех электрических машин основан на взаимодействии магнитных полей. Вещества по магнитным свойствам делятся на диамагнетики, ферромагнетики, ферримагнетики, парамагнетики.
Основные характеристики магнитного поля:
Напряженность – возникает вокруг проводника с током.
Индукция.

|

Вольт
1833 – генератор Риччи
1834 – генератор Якоби
Эдисон
Машины постоянного тока.
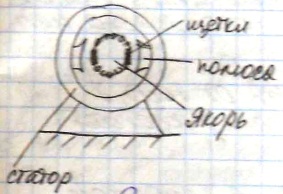
Машины постоянного тока содержат неподвижную (статор) и подвижную (якорь) части.
Статор – цельнометалическая труба, внутри которой находятся полюса в виде постоянных магнитов или электромагнитов. Число полюсов всегда четное. У маломощных машин – 1 пара, мощных – 2-3 пары.
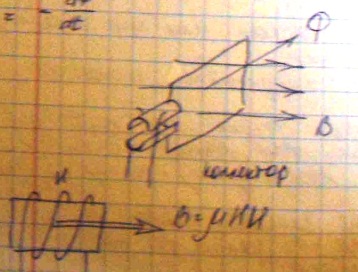
Якорь преимущественно выполнен в виде стального многополюсного барабана выбранного для уменьшения вихревых токов. В пазы укладываются секции обмотки, концы секций соединяются по определенной схеме и выводятся на коллектор, представляющий собой цилиндр или круг, образованный медными пластинами.
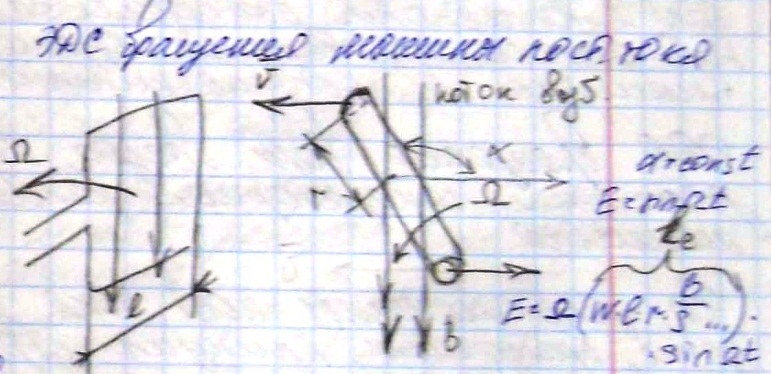
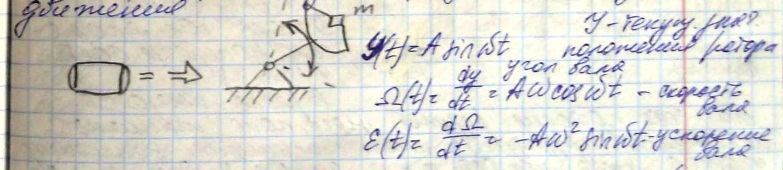
ЭДС вращения машины постоянного тока
Рамка
вращается, где ее активные части длинной
 имеют поперечно составляющие линейные
скорости
имеют поперечно составляющие линейные
скорости
 .
В активных частях рамки наводятся ЭДС.
Если предположить, что магнитное поле
статора равномерно, то вектор скорости
.
В активных частях рамки наводятся ЭДС.
Если предположить, что магнитное поле
статора равномерно, то вектор скорости
 ,
а значит и ЭДС имеют синусоидальную
форму. Кроме того она пропорциональна
скорости вращения, активной длине,
интенсивности поля возбуждения, радиусу
вращения
,
а значит и ЭДС имеют синусоидальную
форму. Кроме того она пропорциональна
скорости вращения, активной длине,
интенсивности поля возбуждения, радиусу
вращения
 для всей обмотки, числу витков. ЭДС
зависит от схемы соединения обмотки,
геометрии магнитопровода, площади
полюсов
для всей обмотки, числу витков. ЭДС
зависит от схемы соединения обмотки,
геометрии магнитопровода, площади
полюсов
 и других конструктивных параметров
машины.
и других конструктивных параметров
машины.

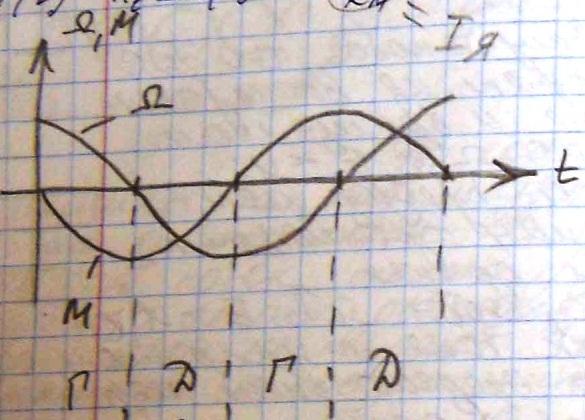
В машине постоянного тока обмотка якоря с внешними зажимами связана ч/з коллектор, который переключает концы секций обмоток при переходе синуса через ноль, т.е. выпрямляют ЭДС секции. Секции сдвинуты друг относительно друга на некоторый угол и по фазе, поэтому ЭДС на щетках или зажимах (на выходе якорной цепи) имеет форму:
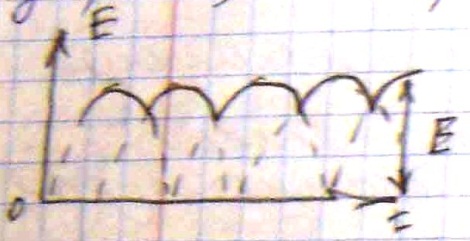
Таким
образом, для ЭДС вращающегося якоря
 ,
где
,
где
 – коэффициент ЭДС – константа для
данной машины, так же называемая
«конструктивным коэффициентом», в
которую входит магнитный поток.
– коэффициент ЭДС – константа для
данной машины, так же называемая
«конструктивным коэффициентом», в
которую входит магнитный поток.
В машинах с обмотками возбуждения поток можно задавать током возбуждения. В исполнительных двигателях автоматики поток возбуждения не меняют, кроме того часто используются машины с постоянными магнитами. ЭДС вращения возникает всегда, независимо от того, в двигательном или генераторном режиме работает машина.
Электрическая цепь машины постоянного тока. Управление якорной цепью, вращающий момент, принцип обратимости.
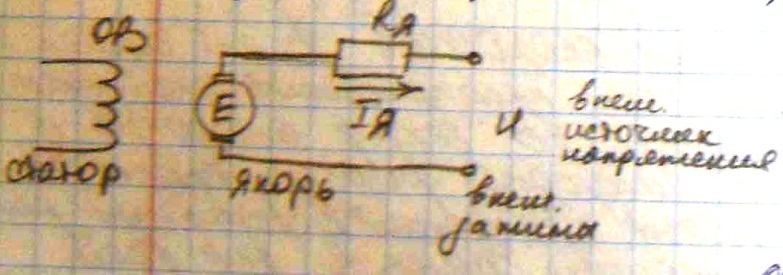
Статор ОВ – обмотка возбуждения
 – активное сопротивление всех внутренних
цепей машины (якорной обмотки, коллектора,
щеток и всех соединений).
– активное сопротивление всех внутренних
цепей машины (якорной обмотки, коллектора,
щеток и всех соединений).
Под
действием внешнего напряжения и ЭДС
вращений возникает ток якоря
 .
Вследствие этого возникает магнитное
поле якоря, линии индукции которого
расположены поперек поля статора;
возникает вращающий момент. Как и ЭДС
вращения, он определяется конструкционным
коэффициентом, а так же током якоря.
.
Вследствие этого возникает магнитное
поле якоря, линии индукции которого
расположены поперек поля статора;
возникает вращающий момент. Как и ЭДС
вращения, он определяется конструкционным
коэффициентом, а так же током якоря.
 .
.
Можно записать уравнение электрического равновесия:

Внешнее напряжение уравновешивается ЭДС вращения якоря и падением напряжения на активном сопротивлении машины.
Предположим,
что
вращения такова, что ЭДС вращения точно
равна напряжению на внешних зажимах.
Тогда ток якоря и вращающий момент
отсутствуют. Предположим, что
 ,
при этом машина будет преодолевать
момент сопротивления, т.е. отдавать
механическую нагрузку – двигательный
режим. Знаки момента и скорости при
этом одинаковы. Если
,
при этом машина будет преодолевать
момент сопротивления, т.е. отдавать
механическую нагрузку – двигательный
режим. Знаки момента и скорости при
этом одинаковы. Если
 ,
в этом случае меняется знак тока и
направление момента. Машина будет
потреблять энергию внешнего механического
источника энергии и преобразовывать
ее в электрическую – генераторный
режим.
,
в этом случае меняется знак тока и
направление момента. Машина будет
потреблять энергию внешнего механического
источника энергии и преобразовывать
ее в электрическую – генераторный
режим.
В этом заключается принцип обратимости, суть которого в том, что машина может работать как в двигательном, так и в генераторном режимах. Этот принцип справедлив для всех типов машин.

В автоматических системах двигатель часто работает попеременно, как двигатель и как генератор. Это характерно, например, для периодических законов движения.
Если
нагрузка часто инерционная, то
электромагнитный момент, создаваемый
двигателем, уравновешивается моментом
инерции движения масс
 .
.


– питание статорной обмотки.
Это свойство часто используется на электротранспорте, где торможение осуществляется соответствующим выбором режима работы тягового двигателя.