

3.3 Выбор и расчет измерительного комплекта для контроля температуры в ванне.
Для измерения температуры можно использовать манометрический термометр или электрический термометр с вторичным прибором, или термометр сопротивления с вторичным прибором.
Наибольшее применение для измерения небольшого диапазона температур (0–100С) нашли термометры сопротивления.
На примере ванны нанесения сплава проведем расчет платинового термометра. Существует три класса точности платиновых термометров А, В и С. Определим абсолютную погрешность для термометра С класса при измерении температуры равной 25 ºС:
= (0,60 + 8,010-3Т) оС; (3.1)
= (0,60 + 8,010-3 · Т)оС = (0,60 + 8,010-3 25)оС = 0,8оС.
В качестве вторичных приборов в комплекте с ТС выбираем «Сосна 002» с классом точности 0,25 ( = 0,25%).
Абсолютная погрешность при Тmax = 100С:
ΔМ = γ · Тmax / 100, (3.2)
ΔМ = 0,25 · 100 / 100 = 0,25С.
Процесс измерения относится к случайным явлениям, поэтому абсолютную ошибку измерительного комплекса необходимо определить как сумму независимых случайных величин по формуле:
= 1,1 ·
 ,
(3.3)
,
(3.3)
Определим абсолютную ошибку измерительного комплекта, в который входит платиновый ТС, «Сосна 002» при температуре 25С для класса С.
= 1,1 ·
 ≈ 0,9С.
≈ 0,9С.
По произведенному расчету видно, что выбранный комплект измерительных приборов обеспечивает выполнение технологического процесса в соответствии с вышеуказанными требованиями, даже при использовании ТС класса С.
3.4 Выбор регулятора температуры
Основным параметром регулирования является температура электролита в гальванических ваннах.
Проведем выбор регулятора температуры в ванне совмещённого обезжиривания-травления при следующих исходных данных: допустимое значение статической ошибки 3°С (уст.доп .= 0,03), динамической ошибки 5°С (yдин.доп .= 0,05), время регулирования Тр.доп. = 10 мин, переходной процесс с 20%-ным перерегулированием, коэффициент передачи объекта ko = 0,9, постоянная времени То = 4 мин, время запаздывания τ = 1 мин, максимальное возмущение xв = 0,12.
В процессе обработки необходимо поддерживать температуру электролита 60°С. Характер действия регулятора определяем по величине отношения времени запаздывания объекта к его постоянной времени
Поскольку 0,25 < τ/Т0<1,0, то необходим регулятор непрерывного действия.
Динамический коэффициент регулирования Rд характеризует степень воздействия регулятора на объект. Он определяется по формуле
 (3.4)
(3.4)
где yо – максимальное отклонение регулируемой величины при внесении возмущающего воздействия.
yo = ko ∙ xв = 0,9 ∙ 0,12 = 0,108,
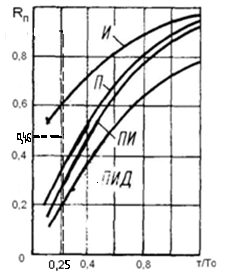
Рисунок 3.1 − График для определения динамического коэффициента регулирования
Из рисунка 3.1 видим, что подходят П-, ПИ- и ПИД-регуляторы.
Проверяем ПИ и ПИД- регуляторы. по времени регулирования Тр по условию:
Тр<.Тр.доп.
По графику 3.2 определим время регулирования

Рисунок 3.2 − График для определения времени регулирования (для переходного процесса с 20%-ным перерегулированием)
Тр= 12 ∙ 1 = 12 мин >10 мин. (для ПИ-регулятора)
Тр= 8 ∙ 1 = 8 мин <10 мин. (для ПИД-регулятора)
Таким образом, можно сделать вывод о том, что по времени регулирования ПИ-регулятор не подходит.
Для регулирования выбираем регулятор с ПИД- законом регулирования. Определяем оптимальные значения параметров настройки ПИД- регулятора:
1) коэффициент передачи регулятора kр = 6,2/0,9 = 6,89 мин;
2) время интегрирования Ти = 2 ∙ 1 = 2 мин;
3) время дифференцирования Тд = 0,4 ∙ 1 = 0,4.