

Координаты шарниров
- i - угол поворота звена i относительно звена i-1 вокруг оси Zi-1, если i = [ВП] (рис. 1.2);
si - линейное перемещение звена i относительно звена i-1 вдоль оси Zi-1, если i = [ПП].
Замечание:
“i = [ВП]” следует читать “сочленение i – вращательного типа»,
“i = [ПП]” следует читать “сочленение i – поступательного типа»,
i = 1,2,…,n.
Нулевые координаты сочленений соответствуют положению ИМ, которое принимается за исходное.
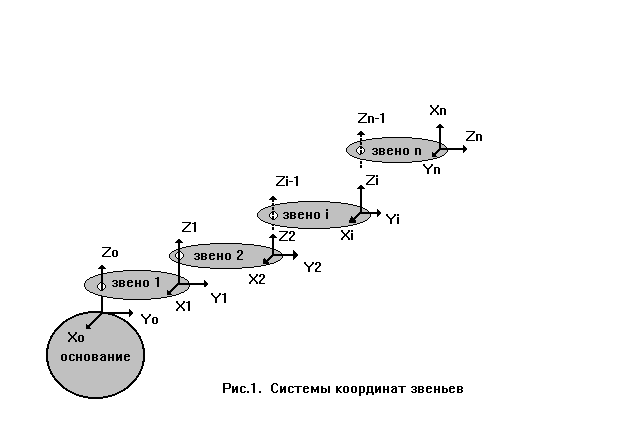

Рис.1.2. Координаты сочленений ИМ
Параметры им
Параметры кинематической схемы.
n – число звеньев ИМ,
= {i } - вектор (nx1) индикаторов типов i сочленений,
в котором (i = 1, если i-й шарнир – ВШ (ВП) и i = 0, если i-е сочленение – ПШ (ПП)); i = 1,2,…,n.
Конструктивные (геометрические) параметры звеньев ИМ (рис.1.3).
Углы установки осей СК смежных звеньев i, i,, i – три угла, на которые
следует повернуть СКi-1 последовательно вокруг осей Xi-1, Yi-1, Zi-1, так, чтобы оси СКi-1 стали параллельны соответствующим осям СКi при значении i = 0 (в исходном положении i-го сочленения); i = 1,2,…,n.
Длина звена i – вектор li, проведенный из начала СКi-1 к началу СКi при значении si = 0 (в исходном положении i-го сочленения); вектор li задается в проекциях на оси СКi : li(i) = { lix liy liz }T;
i = 1,2,…,n.
Yi
Zi-1
Zi
li(i)



i


Рис.1.3. Конструктивные
параметры ИМ

Xi

Xi-1
i
i





Yi-1

Пояснение. Отсчет углов установки шарниров и длин звеньев производится при нулевых значениях координат сочленений.
Инерционные параметры звеньев ИМ (рис.1.4).
Yi
Zic
Zi
Yic
ri(i)


Xi
Xic
Рис. 1.4. Инерционные параметры звеньев ИМ
mi - масса звена i; i = 1,2,…,n,
ri - вектор координат центра масс звена i - вектор, проведенный из
начала СКi в центр масс звена i; вектор ri задается в проекциях на оси СКi : ri(i) = {rix riy riz}T ; i = 1,2,…,n,
Ii - тензор инерции звена i в системе координат СКiс, оси которой
параллельны осям СКi , а начало совмещено с центром масс звена i; i = 1,2,…,n.
Тензор инерции – матрица размера (3х3):
Ii
=

Диагональные элементы матрицы Ii - моменты инерции звена i относительно осей СКiс (центральные, осевые моменты инерции); недиагональные элементы – смешанные моменты инерции.
Iхх i = i m i (yi 2 + zi 2) , Iyy i = i m i (xi 2 + zi 2), Iяя i = i m i (xi 2 + yi 2), -
осевые моменты инерции,
I хy i = - i m i (xi yi ) , I yz i = - i m i (zi yi ) , I xz i = - i m i (zi xi ), …
где m i - масса -й точки i- го звена, xi , yi , zi - координаты этой точки.
Замечание. У большого числа ИМ тензоры инерции звеньев могут быть представлены в виде матриц диагонального вида.
Замечание. Если звенья ИМ - твердые тела, конструктивные и инерционные параметры ИМ имеют постоянные (для данного ИМ) значения. Если звенья ИМ – упругие тела, эти параметры ИМ (за исключением масс звеньев) зависят от параметров упругой деформации звеньев и являются переменными.