

Частотные критерии качества
Эти методы не предусматривают вычисления р(t)? А основаны на анализе частот хар-к , поэтому явл косвенным , потому и носят название критериев .Рассм вещ-частотные хар-ки
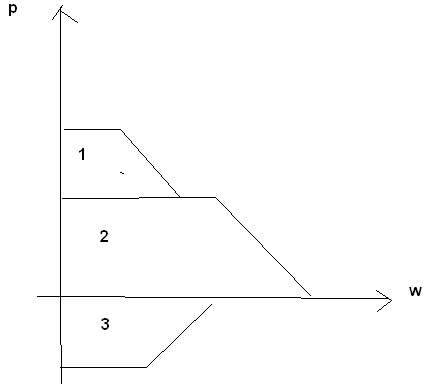
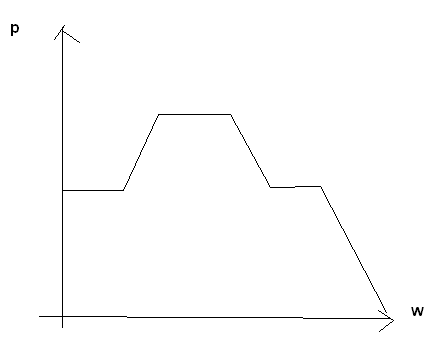
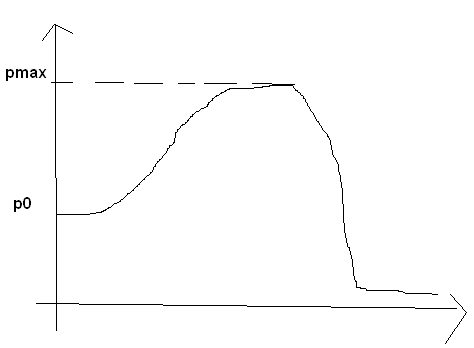
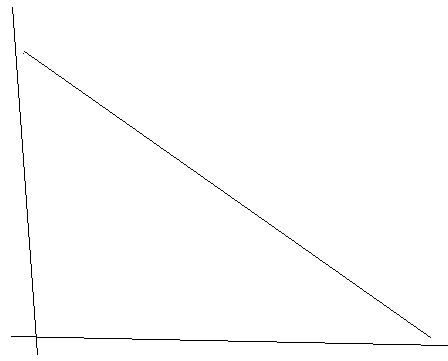
ВЧХ:![]()
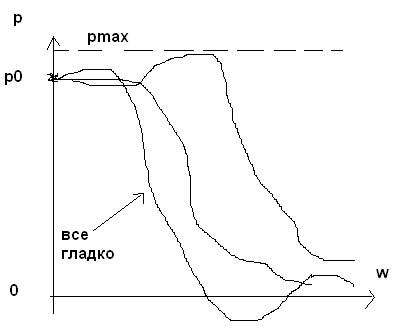
Pmax –мах знач веществ части
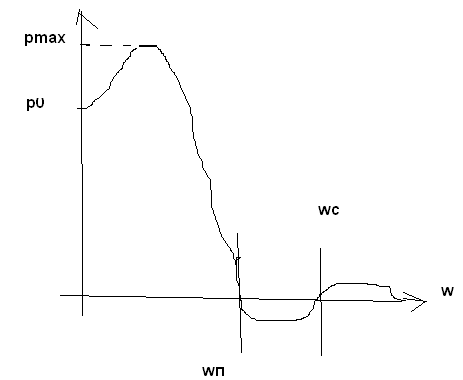
w>wc область несуществ частот
wп –обл перехода
1. Двум сист с близ ВЧХ соотв близкие их перех проц, последовательные и одинак показатели кач-ва
2 Интервал несуществ частот w>wc влияет на перех ф-ю Н(t), но только в начале при малых t
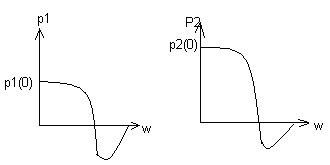
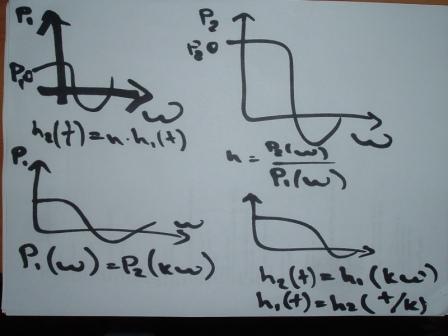
3. Если две сист имеют разн ВЧХ но подобн по форме, то масштобирование можно свести к аналогичным и вых процессы.
А)
h![]() (t)=
h*h
(t)=
h*h![]() (t),
где n=
(t),
где n=![]()
Б) графики те же P (w)= P (kw)
h
(t)=
h
(k*t),
h
(t)=h![]()
Это позвол опред показат качества по аналогии
4. Лин сист отвеч принципу аддитивности
Если
P(w)=![]()
![]() h(t)
=
h(t)
=
![]() (t)
(t)
На этом принципе основан метод трапеции для расчёта вых хар-к
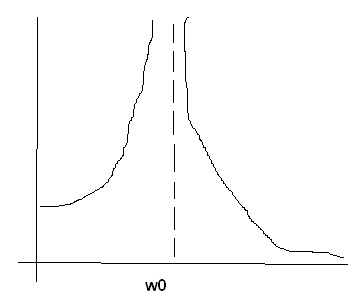
5 опред колебательности
M=![]()
6. Опред перегруппирования
Если х-ка невозраст
Если монот-убыв
если вид
 то
сист нах на границе устойч
то
сист нах на границе устойч
7. Время регулир чем шире хар-ка по w тем выше быстродейств сист, чем уже хар-ка , тем меньше быстродействие системы.
Используя ВЧХ можно использ св-ва системы по аналогии с объектом , св-ва которого же известны .
Интегральные критерии качества переходных процессовСау.

Предъявив
к перех процессу всё более жёсткие
требования , мы можем перейти к образцовому
, базовому перех процессу-
![]() .Если
сущ-ет шаблон понятие – траектория ,
подразумевая под ней как просто перех
ф-ия , так и пространственная , то оценка
качества сводится к оценки близости ,
совпадения с этой траекторией
Надо интегрировать по всей траектории
либо по независимому параметру
.Если
сущ-ет шаблон понятие – траектория ,
подразумевая под ней как просто перех
ф-ия , так и пространственная , то оценка
качества сводится к оценки близости ,
совпадения с этой траекторией
Надо интегрировать по всей траектории
либо по независимому параметру
Если
траектория h![]() (t),
то
(t),
то
![]() - мера качества.
- мера качества.
Такой
и подобные интегралы и явл интегральн
критериями (это накопленная оценка на
всеё территории) . var
= J![]() 0 / Такие ф-ии наз функуионалами
(определённые интегралы)
0 / Такие ф-ии наз функуионалами
(определённые интегралы)
S= функционал
Использ функ-лы различ порядков, определяющих сложность критерия
J=![]()
F – нейкий вид преобразователей над исх ф-ией f(t)
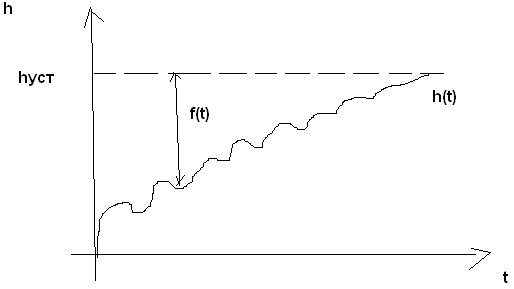
T=![]() f(t)
хар-ет перех процессы , но f(t)
h(t)
f(t)
хар-ет перех процессы , но f(t)
h(t)
В
простом случае f(t)=hуст-h(t)=y![]() (отличие
некоторого процесса от некот эталона)
(отличие
некоторого процесса от некот эталона)
В зависимости от F будут разл интегральные оценки. Самые простые
линейные оценки (лин функционалы)
S=![]()
![]() -
взвешивающая ф-ия
-
взвешивающая ф-ия
![]()
Обобщённая линейная оценка
S![]() =
=![]()
Рассм несколько таких оценок
S![]() =
=![]() .
Такая оценка пригодна для монотонных
процессов
.
Такая оценка пригодна для монотонных
процессов
S![]() =
=![]() - первый момент распр f(t)
- первый момент распр f(t)
S - проекция центра тяжести на ось t
S![]() =
=![]() .
Набор таких моментов S
……..S
явл
более простым . этот подход наз методом
моментов .Для колебательных перех
процессов исп-ся квадратичные оценки.
.
Набор таких моментов S
……..S
явл
более простым . этот подход наз методом
моментов .Для колебательных перех
процессов исп-ся квадратичные оценки.
J![]() =
=![]() J
=
J
=![]()
Квадрат оценка более универсальная . Если построена эталон ф-ия , то достаточно 0 и 1-го порядка , чтобы вычислить эталон .
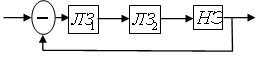
Осн. Особен. Нелин. Сау
Уравнения связывающие вход и выход могут быть нелинейными уравнениями. Если нелинейность небольшая,то можно линеоризировать систему. Если в САУ есть хотя бы одно звено имеющее существенную нелинейность, то система нелинейна.
Обычно линейную часть можно выделить.
Все нелинейности делятся на два класса:
Однозначные – однозначная связь между входным и выходным сигналом.
Неоднозначные – если система зависит не от одной однозначной связи входа к выходу, а и от, например, изменения t в сторону + или - .