

5.4 Передаточная функции и частотные характеристики линейных систем.
![]()
Изображение по Лапласу:
W(p) – передаточная функция (показывает как звено преобразует входной сигнал).
Передаточной функцией называется отношение изображения по Лапласу выходной величины к изображению по Лапласу входной величины при нулевых начальных условиях. Знаменатель передаточной носит название характеристического многочлена системы. Корни этого многочлена определяют свободные колебания системы.
6.1 Туннельный диод
Туннельный диод или диод Есаки — полупроводниковый диод на основе вырожденного полупроводника, в котором туннельный эффект приводит к появлению на вольт-амперных характеристиках при прямом напряжении участка отрицательной дифференциальной проводимости.

Изготавливается из германия или арсенида магния, это вещ-ва с малым удельным сопротивлением,что приводит к высокой напряженности поля. В нем, как и в других диодах происходит диффузионное перемещение носителейчерез p-n переход и обрайтный их дрейф под действием поля.Основную роль в нем играет туннельный эффект.
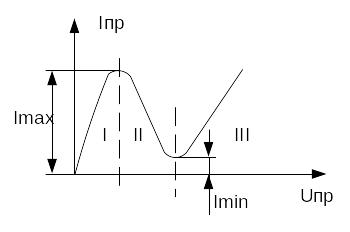
В качестве рабочей используют прямую ветвь ВАХ. Из ВАХ видно, что при повышении напряжения в I и III областях увеличивается ток. Во IIй области с увеличением напряжения уменьшается ток, это означает, что дифференциальное сопротивление имеет отрицательный характер. Работа на этом участке позволяет использовать туннельный диод как усилительный элемент.

Основными параметрами туннельного диода явл. ток пика Iп(кривая 1 на рис) и отношение тока пика к току впадины Iп/Iв.
Туннельный диод является быстродействующим полупроводниковым прибором и применяется в генераторах высокочастотных колебаний и импульсных переключателях.Существует разновидность туннельного диода-обращенный диод.
6.3
6.4 Методы преобразования струтурных схем.
12,13.Структурное преобразование схем.
Перестановка звеньев.
![]()
![]()
Перестановка сумматоров.
![]() у=x1-x2+x3
у=x1-x2+x3
![]() у=x1+x3-x2
у=x1+x3-x2
Преобразование последовательного соединения звеньев к одному эквивалентному звену.
![]()
![]()
Выходной сигнал предыдущего звена - это входной сигнал предыдущего.
x1(p)=x(p) W1(p)
x2(p)= x1(p) W2(p)=x(p) W1(p) W2(p)
y(p)= x(p) W1(p) W2(p) W3(p)…….. Wn(p)
4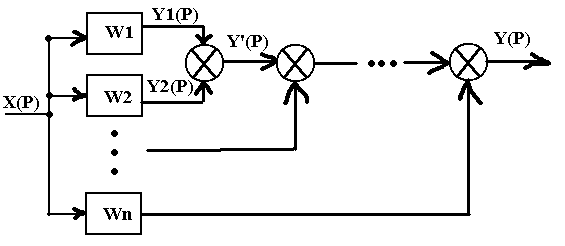 .
Преобразование параллельного соединения
звеньев к одному эквивалентному звену.
.
Преобразование параллельного соединения
звеньев к одному эквивалентному звену.
I’(p)=I1(p)+I2(p)=W1(p)X(p)+ W2(p)X(p)
W’(p)=W1(p)+W2(p)
При параллельном соединение входной сигнал одинаков, а на выходе сумма выходных сигналов.
5. Приведение соединения звеньев с обратной связью к эквивалентному звену.
Wпр- прямая Wос – обратная связь Е – сигнал рассогласования
Для положительной обратной связи
W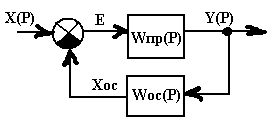 (p)=
(p)=![]() для единичной положительной обратной
связи
для единичной положительной обратной
связи
W(p)=![]()
7.1 Что обозначают цифры в обозначении стабилитронов.
Первая буква обозначает материал полупроводника
Вторая буква обозначает подкласс стабилитрона
Цифра обозначает мощность стабилитрона1-3- мощность менее 0.3Вт,4-6-мощность от 0,3-5,7-9-от 5 до 10Вт
Две цифры соответствуют напряжению стабилизации
Буква указывает особенность конструкции или корпуса стабилитрона (А –металлический корпус)
7.3

7.4 Базовые законы управления.
П-регулятор, пропорциональный регулятор Передаточная функция П-регулятора: Wп(s) = K1. Принцип действия заключается в том, что регулятор вырабатывает управляющее воздействие на объект пропорционально величине ошибки (чем больше ошибка Е, тем больше управляющее воздействие Y).
И-регулятор, интегрирующий регулятор Передаточная функция И-регулятора: Wи(s) = К0/s. Управляющее воздействие пропорционально интегралу от ошибки.
Д-регулятор, дифференцирующий регулятор Передаточная функция Д-регулятора: Wд(s) = К2*s. Д-регулятор генерирует управляющее воздействие только при изменении регулируемой веричины: Y= K2 * dE/dt. На практике данные простейшие П, И, Д регуляторы комбинируются в регуляторы вида ПИ, ПД, ПИД (см. рис.1):
![]()
Рисунок 1 - Виды непрерывных регуляторов
В зависимости от выбранного вида регулятор может иметь пропорциональную характеристику (П), пропорционально-интегральную характеристику (ПИ), пропорционально-дифференциальную характеристику (ПД) или пропорционально-интегральную (изодромную) характеристику с воздействием по производной (ПИД-регулятор).
ПИ-регулятор, пропорционально-интегральный регулятор (см. рис.3.18.а) ПИ-регулятор представляет собой сочетание П- и И-регуляторов. Передаточная функция ПИ-регулятора: Wпи(s) = K1 + K0/s.
ПД-регулятор, пропорционально-дифференциальный регулятор (см. рис.3.18.б) ПД-регулятор представляет собой сочетание П- и Д-регуляторов. Передаточная функция ПД-регулятора: Wпд(s) = K1 + K2 s.
ПИД-регулятор, пропорционально-интегрально-дифференциальный регулятор (см. рис.3.18.в)
ПИД-регулятор представляет собой сочетание П-, И- и Д-регуляторов. Передаточная функция ПИД-регулятора: Wпид(s) = K1 + K0 / s + K2 s.