

7.4. Правило Крамера решения систем линейных уравнений.
Габриэль Крамер (1704 – 1752) ─ швейцарский математик, который в 1750 г. нашёл метод решения систем линейных уравнений, названный впоследствии правилом Крамера.
Определение. Система линейных уравнений называется крамеровской, если тело уравнений равно числу неизвестных и определитель матрицы системы отличен от нуля.
Теорема 7.1. Крамеровская система имеет единственное решение, которое находится по формулам
![]()
где
![]() ─ определитель матрицы системы,
─ определитель матрицы системы,
![]() ─ определитель, полученный из
,
заменой столбца коэффициентов при
─ определитель, полученный из
,
заменой столбца коэффициентов при
![]() на столбец свободных членов.
на столбец свободных членов.
Доказательство. Пусть дана крамеровская система
 (4)
(4)
Тогда
│А│=
∆ =

0.
0.
По теореме 3 лекции 6 матрица системы А имеет обратную матрицу А-1.
Запишем крамеровскую систему (4) в матричном виде
АХ = В (5)
где
А = , Х = , В = .
Умножим обе части матричного уравнения (5) слева на А-1:
А-1(АХ) = А-1В,
Ввиду ассоциативности умножения матриц имеем
А-1(АХ) = (А-1А)Х = ЕТХ = Х.
Таким образом,
Х = А-1В ─ решение системы.
1) Покажем, что такое решение единственно. Предположим, что Х1 и Х2 ─ два решения матричного уравнения (5). Тогда АХ1 = В и АХ2 = В, откуда АХ1 = АХ2. Умножая обе чисти равенства на А-1 слева, имеем
А-1(АХ1) = А-1(АХ2),
(А-1А)Х1 = (А-1А)Х2,
ЕnХ1 = ЕnХ2,
Х1 = Х2.
Следовательно, система (4) имеет единственное решение.
2) Найдём решение системы (4). Из равенства Х = А-1В имеем:
=
![]() ,
,
откуда
![]()
 ,
,
![]()
 ,
,
……………………………………………………..
![]()
 .
.
Обозначая
определители в правой части равенств
![]() соответственно, получим формулы
.
соответственно, получим формулы
.
7.5. Матричный метод решения систем линейных уравнений.
Этот метод также применяется для решения крамеровских систем. Основан он на равенстве
Х = А-1В,
кторое мы получили при доказательстве теоремы 7.1.
8.1. Прямоугольная декартова система координат в пространстве.
Прямоугольная (декартова) система координат в пространстве определяется заданием масштабной единицы измерения длин и трёх пересекающихся в одной точке О взаимно перпендикулярных осей Ох, Оу и Оz. Точка О называется началом координат, Ох ─ осью ординат, Oz ─ осью аппликат (рис.8.1).
П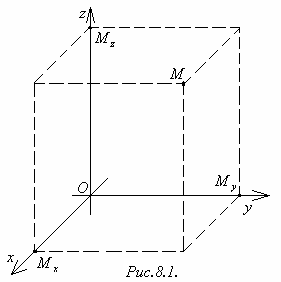 усть
М ─ произвольная точка пространства
(рис.8.1). Проведём через точку М три
плоскости, перпендикулярные координатным
осям. Точки пересечения с осями Ох, Оу
и Оz
обозначим соответственно Мх,
Му
и Мz.
Прямоугольными
(декартовыми)
координатами
точки М в
пространстве называются числа х0,
у0
и z0,
соответствующие точками Мх,
Му
и Мz
на
соответствующих осях. При этом х0
называется абсциссой,
у0
─ ординатой,
z0
─ аппликатой
точки М. То, что точка М имеет координаты
х0,
у0
и z0
обозначается: М(х0;
у0;z0).
усть
М ─ произвольная точка пространства
(рис.8.1). Проведём через точку М три
плоскости, перпендикулярные координатным
осям. Точки пересечения с осями Ох, Оу
и Оz
обозначим соответственно Мх,
Му
и Мz.
Прямоугольными
(декартовыми)
координатами
точки М в
пространстве называются числа х0,
у0
и z0,
соответствующие точками Мх,
Му
и Мz
на
соответствующих осях. При этом х0
называется абсциссой,
у0
─ ординатой,
z0
─ аппликатой
точки М. То, что точка М имеет координаты
х0,
у0
и z0
обозначается: М(х0;
у0;z0).
Плоскости Оху, Оуz и Охz называются координатными плоскостями. Они делят всё пространство на восемь частей, называемых октантами.