

9. Расчет тормозных свойств
Измерителями тормозной динамичности автомобиля являются замедление, время и путь торможения, остановочный путь в определенном интервале скоростей. Для их определения необходимо знать характер замедления во времени.
Расчетная формула остановочного времени
t0 = t1 + t2 + t3 + t4 + t5, (9.1)
где t1 - время реакции водителя, t1 = 0,3 - 2,5 с; t2 - время срабатывания привода тормозов, t2 = 0,4 с, для автопоездов - 0,6 с; t3 - время нарастания замедления, t3=0,6 с; t4 - время торможения с установившимся замедлением, t5 - время оттормаживания, для гидропривода t5=0,3 с, для пневмопривода-1,5-2,0 с;
t4
=
 ,
(9.2)
,
(9.2)
где V0 - начальная скорость торможения, км/ч; jн - замедление в режиме наката, приближенно jн = 9,8 , где - коэффициент сопротивления качению, = 0,007 - 0,015; j - установившееся замедление.
j
=
 ,
(9.3)
,
(9.3)
где - коэффициент сцепления шин с дорогой; g = 9,8 м/с2; КЭ - коэффициент эффективности торможения (таблица 9.1).
Таблица 9.1 - Коэффициенты эффективности торможения
Параметры |
Значение параметров |
||||
|
0,8 |
0,7 |
0,6 |
0,5 |
0,4 |
КЭ |
1,96 |
1,76 |
1,48 |
1,21 |
1,0 |
Остановочный путь
S0 = S1 + S2 + S3 + S4 + S5. (9.4)
где
S1
=
 (9.5)
(9.5)
S2
=
 ;
(9.6)
;
(9.6)
S3
=
 ;
(9.7)
;
(9.7)
S4
=
 (9.8)
(9.8)
S5
=
 ,
(9.9)
,
(9.9)
С учетом выражения (9.4) строятся зависимости Sо = (Vо) для значений коэффициента , равных 0,8; 0,6; 0,4. Эта зависимость показана на рисунке 9.1, который построен с учетом времени реакции водителя 1,4с.
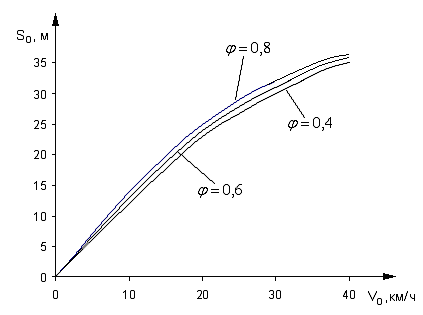
Рисунок 9.1 - Скоростная характеристика тормозного режима движения
На основании проведенных расчетов строится тормозная диаграмма для начальной скорости 40 км/ч (рисунок 9.2).
Где Vо = 40 км/ч;
VВ = V0 - 3.6jн t2; (9.10)
VС = VВ - 1,8jt3; (9.11)
VД = VС - 3.6jt4. (9.12)
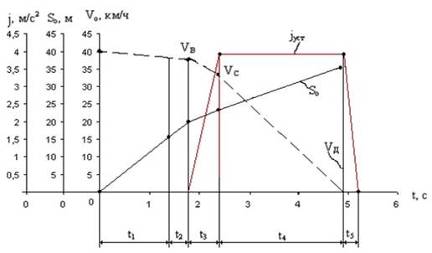
Рисунок 9.2 - Тормозная диаграмма
10. Определение показателей устойчивости, маневренности
10.1 Устойчивость автомобиля
Устойчивость автомобиля непосредственно связана с безопасностью дорожного движения. Нарушение устойчивости выражается в произвольном изменении направления движения, его опрокидывании или скольжении шин по дороге. Различают поперечную и продольную устойчивость автомобиля. Более вероятна и опасна потеря поперечной устойчивости.
Показателями поперечной устойчивости автомобиля при криволинейном движении являются максимально возможные скорости движения по дуге окружности и угол поперечного уклона дороги. Оба показателя определяются из условий заноса или опрокидывания автомобиля.
Максимально допустимая скорость автомобиля по скольжению, м/с
Vcк
=
 ,
(10.1)
,
(10.1)
где R - радиус дуги, м; φу - коэффициент поперечного сцепления,
φу = (0,5 - 0,85) φ, (10.2)
где φ - коэффициент сцепления шин с дорогой в продольном направлении; β - угол поперечного уклона.
Знак "+" в числителе и " - " в знаменателе берутся при движении по уклону, наклоненному к центру поворота дороги, если же он наклонен в сторону, противоположную центру поворота дороги, то в числителе ставится знак " -", а в знаменателе "+".
Тогда
Vcк
=
 ,
,
Vcк
=
 .
.
Где
φу = .
При β = 0
.
При β = 0
Vcк
=
 .
(10.3)
.
(10.3)
Тогда
Vcк
=
Максимально допустимая скорость по опрокидыванию, м/с
Vопр
=
 ,
(10.4)
,
(10.4)
где hц - ордината центра масс груженого автомобиля, м
Тогда
Vопр
=
 .
При β = 0
.
При β = 0
Vопр
=
 .
(10.5). Тогда
.
(10.5). Тогда
Vопр
= .
.
Потеря автомобилем продольной устойчивости выражается в буксовании ведущих колес, что наблюдается при преодолении автопоездом затяжного подъема со скользкой поверхностью.
Показателем продольной устойчивости автомобиля служит максимальный угол подъема, преодолеваемого автомобилем без буксования ведущих колес
tgβбук
=
 ,
(10.6)
,
(10.6)
где а - расстояние от центра масс груженого автомобиля до оси передних колес, м; L - база автомобиля, м; hц - высота сцепного устройства прицепа, м; Gа - вес автомобиля-тягача, т; Gпр - вес полуприцепа, т.
Для одиночного автомобиля
tgβбук
=
 .
(10.7)
.
(10.7)
Тогда
tgβбук
= ,
,
где
βбук
=
На рисунках 10.1 и 10.2 представлены зависимости максимально допустимой скорости автомобиля КАМАЗ 5320 по скольжению и опрокидыванию в зависимости от радиуса поворота.
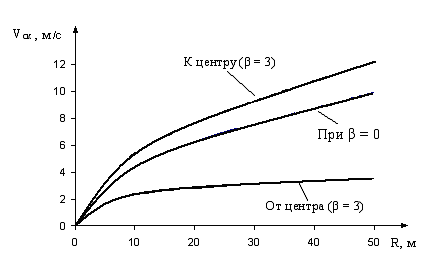
Рисунок 10.1 - Максимально допустимая скорость автомобиля по скольжению
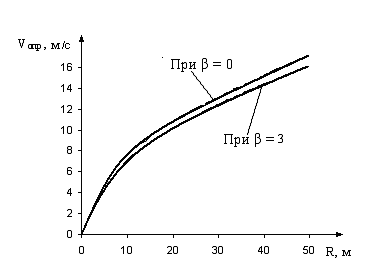
Рисунок 10.2 - Максимально допустимая скорость автомобиля по опрокидыванию