

Основные компоненты нечеткого логического вывода. Фаззификатор.
Для каждой лингвистической переменной определим базовое терм-множество вида, включающее в себя нечеткие множества, которые можно обозначить: отрицательная высокая, отрицателная низкая, нуль, положительная низкая, положительная высокая.
Прежде всего субъективно определим что подразумевается под термами «большая ошибка», «малая ошибка» и т.д., определяя функции принадлежности для соответствующих нечетких множеств. Здесь пока можно руководствоваться только требуемой точностью, известными параметрами для класса входных сигналов и здравым смыслом. Никакого жесткого алгоритма для выбора параметров функций принадлежности пока никому предложить не удалось. В нашем случае лингвистическая переменная «ошибка» будет выглядеть следующим образом.
 Рис.7.
Лингвистическая переменная «ошибка».
Рис.7.
Лингвистическая переменная «ошибка».
Лингвистическую переменную «управление» удобнее представить в виде таблицы:
Таблица 1
Функции принадлежности |
Большое отрицательное UBO |
Малое отрицательное UMo |
Нулевое UZ |
Малое положительное UMp |
Большое положительное UBP |
Значение управления, [В] |
-27 |
-15 |
0 |
15 |
27 |
Блок правил.
Рассмотрим последовательность определения нескольких правил, которые описывают некоторые ситуации:
Предположим, например, что выходной угол равен входному сигналу (т.е. ошибка - нуль). Очевидно, что это желаемая ситуация, и следовательно мы не должны ничего делать (управляющее воздействие - нуль).
Теперь рассмотрим другой случай: ошибка по положению сильно больше нуля. Естественно мы должны её компенсировать, формируя большой положительный сигнал управления.
Т.о. составлены два правила, которые могут быть формально определены так:
если ошибка = нуль, то управляющее воздействие = нуль.
если ошибка = большая положительная, то управляющее воздействие = большое положительное.
 Рис.8.
Формирование управления при малой
положительной ошибке по положению.
Рис.8.
Формирование управления при малой
положительной ошибке по положению.
 Рис.9.
Формирование управления при нулевой
ошибке по положению.
Рис.9.
Формирование управления при нулевой
ошибке по положению.
Ниже в таблице приведены все правила, соответствующие всем ситуациям для этого простого случая.
Таблица 2
|
Ошибка по положению |
||||
BO |
Mo |
Zero |
Mp |
BP |
|
Нечеткий сигнал управления |
UBO |
UMo |
UZ |
UMp |
UBP |
Всего
для нечеткого регулятора, имеющего n
входов и 1 выход может быть определено
![]() правил управления, где
правил управления, где
![]() – количество нечетких множеств для
i-го входа, но для нормального
функционирования регулятора не
обязательно использовать все возможные
правила, а можно обойтись и меньшим их
числом. В нашем случае для формирования
нечеткого сигнала управления используются
все 5 возможных правил.
– количество нечетких множеств для
i-го входа, но для нормального
функционирования регулятора не
обязательно использовать все возможные
правила, а можно обойтись и меньшим их
числом. В нашем случае для формирования
нечеткого сигнала управления используются
все 5 возможных правил.
Дефаззификатор.
Таким образом, результирующее воздействие U будет определяться соответственно выполнению какого-либо правила. Если возникает ситуация, когда выполняются сразу несколько правил, то результирующее воздействие U находится по следующей зависимости:
 ,
где n-число сработавших правил
(дефаззификация методом центра области),
un
– физическое значение управляющего
сигнала, сответствующее каждому из
нечетких множеств UBO,
UMo,
UZ,
UMp,
UBP.
Un(u)
– степень принадлежности управляющего
сигнала u к соответствующему нечеткому
множеству Un={UBO,
UMo,
UZ,
UMp,
UBP}.
Существуют также и другие методы
дефаззификации, когда выходная
лингвистическая переменная пропорциональна
самомому «сильному» или «слабому»
правилу.
,
где n-число сработавших правил
(дефаззификация методом центра области),
un
– физическое значение управляющего
сигнала, сответствующее каждому из
нечетких множеств UBO,
UMo,
UZ,
UMp,
UBP.
Un(u)
– степень принадлежности управляющего
сигнала u к соответствующему нечеткому
множеству Un={UBO,
UMo,
UZ,
UMp,
UBP}.
Существуют также и другие методы
дефаззификации, когда выходная
лингвистическая переменная пропорциональна
самомому «сильному» или «слабому»
правилу.
Промоделируем процесс управления электроприводом с помощью вышеописанного нечеткого регулятора.
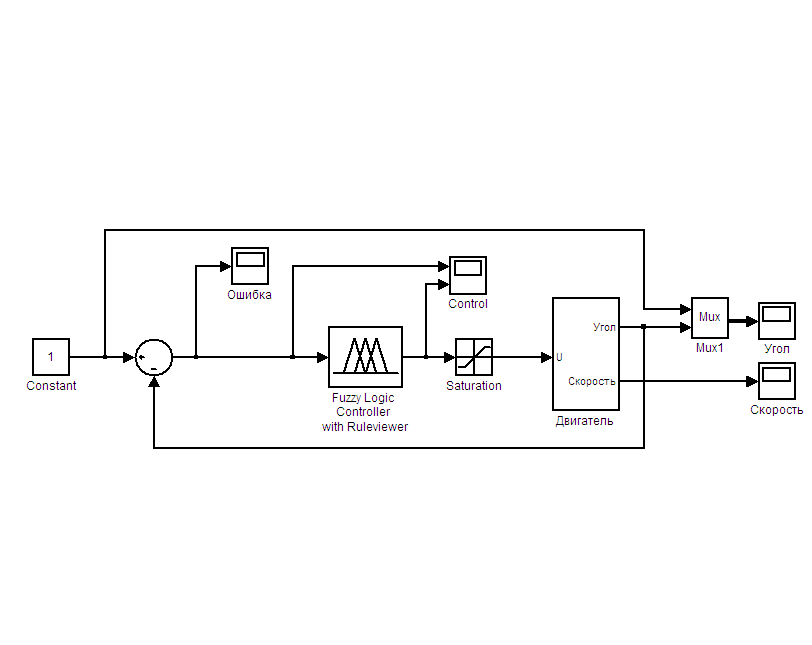 Рис.10.
Структурная схема системы в среде
Matlab.
Рис.10.
Структурная схема системы в среде
Matlab.

Рис.11. Структурная схема нечеткого регулятора в среде Matlab.
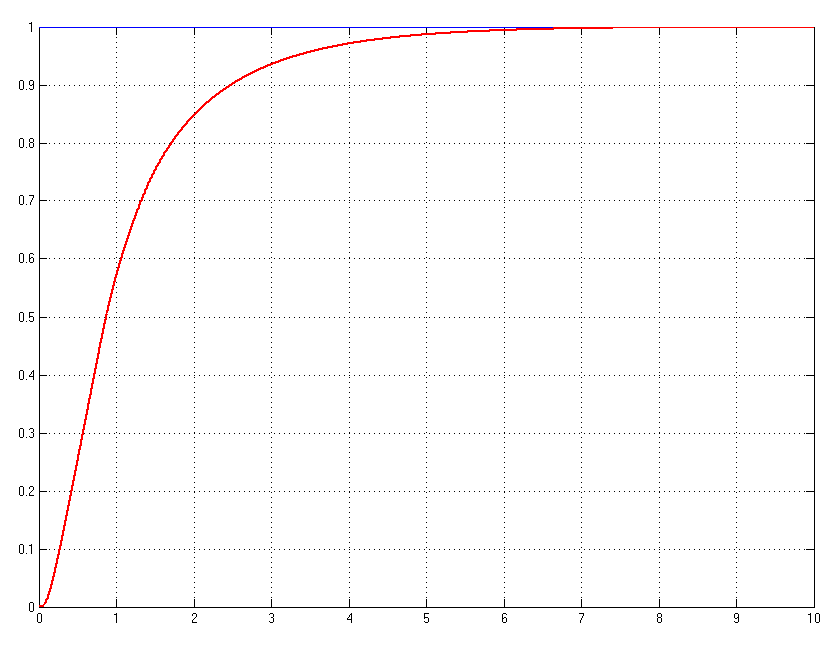
Рис.12. Переходный процесс при единичном ступенчатом воздействии.
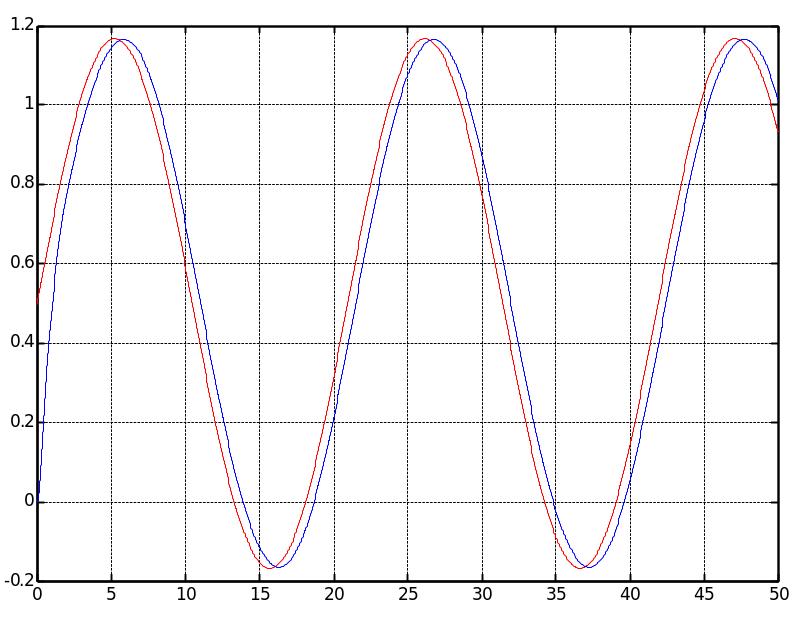
Рис. 13. Переходный процесс при гармоническом входном воздействии для модели с нечетким регулятором, содержащим одну входную лингвистическую переменную.
Анализ характеристик привода с синтезированным алгоритмом управления показывает, что они далеки от оптимальных и хуже, чем при синтезе управления другими методами (слишком большое время регулирования при единичном ступенчатом воздействии и ошибка при гармоническом). Объясняется это тем, что параметры функций принадлежности выбирались достаточно произвольно, а в качестве входов регулятора использовалась только величина ошибки по положению. Естественно ни о какой оптимальности полученного регулятора не может идти и речи. Поэтому актуальной становится задача оптимизации нечеткого регулятора, с целью достижения им максимально возможных показателей качества управления. Т.е. стоит задача оптимизации целевой функции f(a1,a2…an), где a1,a2…an – коэффициенты, определяющие вид и характеристики нечеткого регулятора. Для оптимизации нечеткого регулятора воспользуемся блоком ANFIS из среды Matlab. Также одним из способов улучшения характеристик регулятора может являться увеличение числа его входов. Это сделает регулятор более гибким и улучшит его характеристики. Добавим еще одну входную лингвистическую переменную – скорость изменения входного сигнала (его производную). Соответственно возрастет и число правил. Тогда принципиальная схема регулятора примет вид:

Рис.14 Принципиальная схема нечеткого регулятора с тремя лингвистическими переменными.
Пусть
![]()
![]() - значение скорости входного сигнала.
Базовое терм-множество Т
определим в виде:
- значение скорости входного сигнала.
Базовое терм-множество Т
определим в виде:
Т={”отрицательная (ВО)”, “нулевая (Z)”, ”положительная (ВР)”}.
Расположение функций принадлежности для всех лингвистических переменных показано на рисунке.
Рис.15. Функции принадлежности лингвистической переменной «ошибка».
Рис.16. Функции принадлежности лингвистической переменной «скорость входного сигнала».
В связи с добавлением еще одной лингвистической переменной, количество правил возрастет до 3x5=15. Принцип их составления полностью аналогичен рассмотренному выше. Все они приведены в следующей таблице:
Таблица 3
Нечеткий сигнал управления |
Ошибка по положению |
|||||
BO |
MO |
Z |
MP |
BP |
||
Скорость |
BP |
BO |
BO |
MO |
MP |
BP |
Z |
BO |
MO |
Z |
MP |
BP |
|
BO |
BO |
MO |
MP |
BP |
BP |
|
Например, если если ошибка = нуль, а производная входного сигнала = большая положительная, то управляющее воздействие = малое отрицательное.
 Рис.17.
Формирование управления при трех
лингвистических переменных.
Рис.17.
Формирование управления при трех
лингвистических переменных.
В связи с увеличением числа входов и соответственно самих правил, усложнится и структура нечеткого регулятора.
 Рис.18.
Структурная схема нечеткого регулятора
с двумя входами.
Рис.18.
Структурная схема нечеткого регулятора
с двумя входами.
Добавить рисунок

Рис.20. Переходный процесс при гармоническом входном воздействии для модели с нечетким регулятором, содержащим две входные лингвистические переменные.
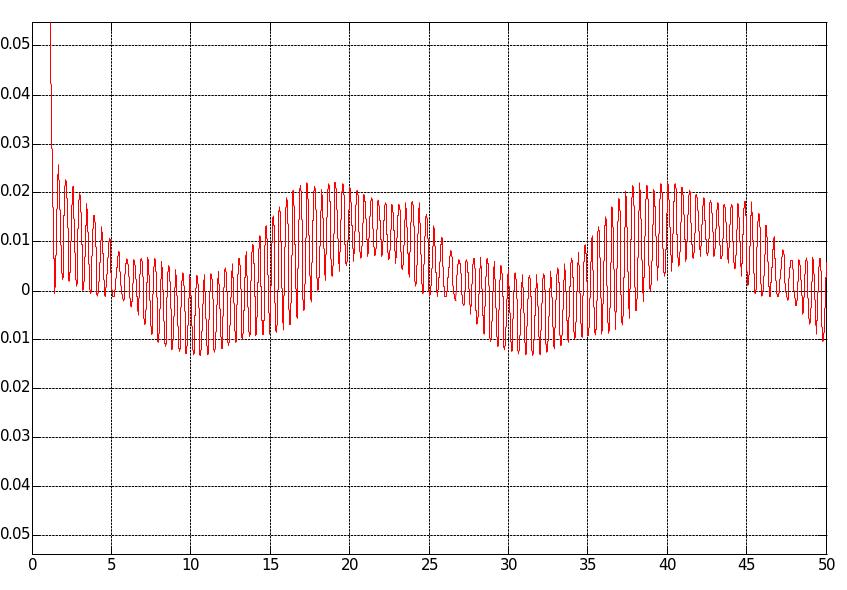
Рис. 21. Сигнал ошибки при гармоническом входном воздействии для модели с нечетким регулятором, содержащим две входные лингвистические переменные.
Промоделируем работу нечеткого регулятора с двумя входами в среде Matlab. Структурная схема модели будет точно такой же, как на рис. 19. Из графика переходного процесса для гармонического входного воздействия можно видеть, что точность системы значительно возросла, но при этом увеличилась её колебательность, особенно в местах, где производная выходной координаты стремится к нулю. Очевидно, что причинами этого, как уже говорилось выше, является неоптимальный выбор параметров функций принадлежности, как для входных, так и для выходных лингвистических переменных. Поэтому оптимизируем нечеткий регулятор с помощью блока ANFISedit в среде Matlab.