

3.3. Линеаризация статических характеристик сау
Обычно статические характеристики элементов САУ существенно нелинейных, что затрудняет, а иногда делает невозможным, процесс их исследования и проектирования. Для упрощения решения этой задачи производят реализацию статических характеристик.
Линеаризацией называется замена реальных нелинейных уравнений статических характеристик САУ близкими к ним линейными уравнениями. Для линеаризации характеристик САУ используется метод малых отклонений.
Рассмотрим систему, статическая характеристика которой представляется нелинейным уравнением вида:
![]() .
.
Графическое представление этой характеристики показано на рис. 7. В установившемся режиме работы САУ на входе и выходе рассматриваемого элемента устанавливаются определенные значения соответствующих сигналов, определяемые режимом работы системы. То есть для любого режима работы с САУ справедливо следующее равенство:
![]() .
.
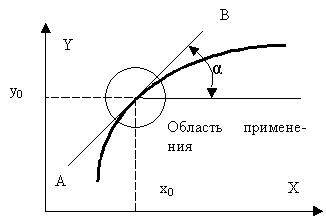
Рис. 6. Графическая интерпретация линеаризации статических характеристик.
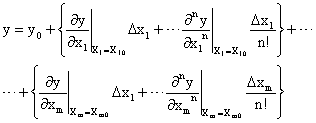
Функцию, имеющую n непрерывных производных, можно разложить в ряд Тейлора. Эта операция дает следующий результат:
 ,
,
где
 —
n-ая производная искомой функции в точке
установившегося режима работы.
—
n-ая производная искомой функции в точке
установившегося режима работы.
При малых отклонениях
от положения равновесия величина
![]() .
Поэтому все слагаемые разложения в ряд
Тейлора будут много меньше, чем два
первых. То есть можно считать, что
.
Поэтому все слагаемые разложения в ряд
Тейлора будут много меньше, чем два
первых. То есть можно считать, что
![]() .
.
Исходя из этого можно считать, что
![]() .
.
Из этого выражения следует, что
![]() .
.
Величина
![]() равна
тангенсу угла наклона касательной,
проведенной к кривой статической
характеристики
равна
тангенсу угла наклона касательной,
проведенной к кривой статической
характеристики
![]() в
точке
в
точке
![]() .
Это показано на рис. 7. То есть
.
Это показано на рис. 7. То есть
![]()
Следовательно, уравнение линеаризованной характеристики можно представить как:
![]() ,
,
где
![]() —
коэффициент передачи линеаризованного
элемента или системы.
—
коэффициент передачи линеаризованного
элемента или системы.
Отсюда следует, что при линеаризации нелинейное уравнение заменяется линейным уравнением в приращениях рассматриваемых переменных.
Аналогичный подход используется, если выходной сигнал устройства является функцией нескольких входных переменных. То есть
![]() .
.
Для линеаризации статических характеристик такого вида определяют частные производные по каждому входному воздействию.
После разложения в ряд Тейлора получаем, что
Пренебрегая всеми производными, кроме первых для каждой входной переменной, получаем, что с достаточной степенью точности выходной сигнал элемента определяется как:
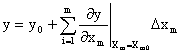
Из этого уравнения
следует, что приращение выходного
сигнала
![]() определяется
как
определяется
как

Следовательно, элемент САУ с несколькими входными сигналами может быть представлен как совокупность нескольких линейных элементов и сумматора, объединяющего выходные сигналы этих элементов.
Область применения такого подхода к линеаризации статических характеристик САУ ограничивается наличием непрерывных производных у исходной функции. При наличии разрывов в производных исходной функции, что характерно для элементов с существенно нелинейными характеристиками, такой способ, строго говоря, не применим к точкам, в которых непрерывность производных не обеспечивается.
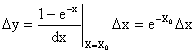
Для примера рассмотрим линеаризацию статической характеристики вида:
![]() .
.
Производная этой функции определяется как
![]() .
.
Следовательно, линеаризованная характеристика рассматриваемого элемента определяется как:
 .
.
Коэффициент
передачи линеаризованного элемента
![]() определяется
как
определяется
как
![]() .
.