

1.1.3. Оценка мощности двигателя второго звена
Максимальная мощность привода определяется по формуле:
![]()
Требуемая
мощность двигателя
![]()
1.1.4. Выбор двигателя привода второго звена
Выбираем двигатель GNM – 3175 фирмы Engel ElectroMotoren.
Технические характеристики:
Номинальная мощность Рн = 250 Вт
Номинальный момент Мн = 0,796 Нм
Номинальная частота вращения nн = 3000 об/мин
Номинальное напряжение Uян = 24 В
Номинальный ток Iян = 12,9 А
Момент инерции ротора Jдв = 0,37∙10-3 кгм2
Сопротивление якоря Rя = 0,106 Ом
Электромагнитная постоянная времени Те = 0,0022 с
Масса m = 5.2 кг
1.1.5. Определение требуемого передаточного отношения и марки редуктора
Вычисление оптимального значения передаточного числа редуктора:

Выбираем редуктор CSG-20-80-2UH-SP, у которого передаточное отношение ip2 = 80, максимальный эквивалентный зазор σ = 1,5∙10-4 рад, жёсткость c = 1,6∙104 Нм/рад и масса m = 0,98 кг.
1.1.6. Проверка правильности выбора двигателя и редуктора
Проверка двигателя по моменту и по частоте вращения:
![]()
![]()
![]()
Так как максимально требуемый момент, и максимально требуемая частота вращения меньше номинальных значений, то двигатель обеспечит нужные режимы работы.
Тепловой расчёт проводить не требуется, так как номинальный момент двигателя превышает требуемый момент, поэтому двигатель не перегреется.
1.2. Выбор двигателя и редуктора привода первого звена
1.2.1. Кинематический анализ манипуляционного механизма
Рассмотрим манипуляционный механизм, когда рабочий орган двигается вдоль оси х (Рис.2.)
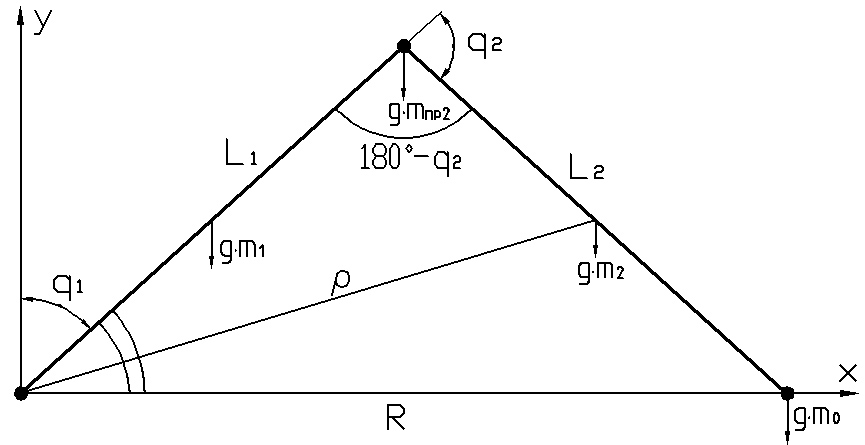
Рис.2. Схема механизма.
Определим скорости и ускорения первого звена в режиме переброски.
![]() ;
;
![]() ;
;
где R- кратчайшее положение от центра системы координат до центра схвата. По теореме косинусов:
![]() ;
;
Изменяя q2 от -90 до +90, вычислим скорости и ускорения первого звена и занесём полученные данные в табл. 1.
Таблица №3.
q2 , |
-90 |
-60 |
-30 |
0 |
30 |
60 |
90 |
R , м |
0,602 |
0,736 |
0,819 |
0,85 |
0,819 |
0,736 |
0,602 |
|
2,49 |
2,03 |
1,83 |
1,76 |
1,83 |
2,03 |
2,49 |
|
7,119 |
5,82 |
5,23 |
5,04 |
5,23 |
5,82 |
7,119 |
Из
таблицы видно что
![]()
Определим максимальные скорость и ускорение рабочего движения первого звена:
![]()
![]()
1.2.2. Силовой анализ манипуляционного механизма
Статический момент первого звена равен:
![]()
где mпр2 = mдв2 + mр2 = 0,98кг + 5,2кг = 6,18 кг.
Динамический момент первого звена равен:
![]() ,
,
Эквивалентный момент инерции первого звена:
![]() ,
,
где
![]() - кратчайшее положение от системы
координат до середины второго звена.
- кратчайшее положение от системы
координат до середины второго звена.
Момент
нагрузки:
![]() .
.
Принимая в расчёт зависимость q1 = 90 - q2/2, вычислим моменты изменяя q2 в диапазоне от -90 до +90.
Так как диапазон возможных перемещений q1 от -45 до +90 в таблице будем рассматривать только положительные значения q2.
Таблица №4
q2, ° |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
q1, ° |
90 |
85 |
80 |
75 |
70 |
65 |
60 |
55 |
50 |
45 |
R , м |
0,85 |
0,847 |
0,837 |
0,821 |
0,799 |
0,771 |
0,737 |
0,697 |
0,652 |
0,602 |
Ω1, м/с |
1,765 |
1,771 |
1,792 |
1,827 |
1,878 |
1,946 |
2,037 |
2,152 |
2,301 |
2,491 |
|
5,042 |
5,061 |
5,12 |
5,219 |
5,364 |
5,561 |
5,819 |
6,15 |
6,574 |
7,118 |
q1+q2, |
90 |
95 |
100 |
105 |
110 |
115 |
120 |
125 |
130 |
135 |
ρ, м |
0,65 |
0,648 |
0,642 |
0,631 |
0,617 |
0,599 |
0,577 |
0,551 |
0,523 |
0,492 |
M1ст, Нм |
84,86 |
84,75 |
84,44 |
83,91 |
83,18 |
82,26 |
81,14 |
79,83 |
78,35 |
76,72 |
Jэкв1, кгм2 |
4,607 |
4,586 |
4,524 |
4,424 |
4,287 |
4,118 |
3,923 |
3,707 |
3,477 |
3,239 |
Мдин1, Нм |
23,23 |
23,21 |
23,16 |
23,09 |
23 |
22,9 |
22,83 |
22,8 |
22,85 |
23,06 |
М1Н, Нм |
130,2 |
130,1 |
129,6 |
128,9 |
127,9 |
126,7 |
125,3 |
123,6 |
121,9 |
120,2 |
Рн1max, Вт |
229,8 |
230,4 |
232,3 |
235,5 |
240,2 |
246,6 |
255,1 |
266,1 |
280,6 |
299,5 |