1. Превращение гироскопа в гирокомпас путем понижения центра тяжести.
Перенесем вектор угловой скорости вращения Земли в точку О горизонтной системы координат и разложим на 2 составляющие.
ωn=ω ·cosφ – угловая скорость убегания меридиана или вертикальная составляющая угл. ск-ти вращения Земли.
ωN=ω ·cosφ – меридианальная составляющая угл. ск-ти вращения Земли.
Под воздействием ωN происходит непрерывное вращение в пространстве плоскости ИГ вокруг полуденной линии NS, при котором Е половина горизонта опускается, а W поднимается, и ось гироскопа поднимается над горизонтом на угол Θ (кажущийся). Проекция ωN на ось y-y ωY называется полезной составляющей угл. ск-ти вращения Земли, и показывает с какой ск-тью поднимается главная ось гироскопа. ωY = ωN ·sinα0=ω ·cosφ·sinα0
П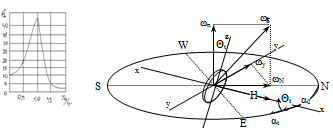
 од
воздействием ωn
происходит
вращение в пространстве плоскости
истинного меридиана вокруг отвесной
линии zn,
при этом для наблюдателя, находящегося
в N
полушарии северная часть меридиана
отходит к W.
Ось гироскопа
переместится от первоначального
положения на угол α0.
од
воздействием ωn
происходит
вращение в пространстве плоскости
истинного меридиана вокруг отвесной
линии zn,
при этом для наблюдателя, находящегося
в N
полушарии северная часть меридиана
отходит к W.
Ось гироскопа
переместится от первоначального
положения на угол α0.
Пусть ЦТ G смещен от точки О подвеса вниз по оси z-z на расстояние а (метацентрическая высота). К центру тяжести ЧЭ приложена сила Р=mg. При горизонтальном расположении оси х-х гироскопа линия действия веса Р проходит через т.О подвеса и не приводит к возникновению момента относительно какой-либо оси гироскопа. Под воздействием рассмотренной ранее ск-ти ωN ось гироскопа приподнимается над пл-тью горизонта на угол Θ , возникает момент силы тяжести вокруг оси, перпендикулярной отвесной линии, т.е. вокруг оси y-y.
Ly=P·l; l = a·sinΘ - плечо; P=mg; - Ly= m·g·a·sinΘ
Т.е. происходит воздействие внешней силы – проявляется одно из св-в гироскопа – прецессия.
Согласно
закона прецессии:


z
Z
Из-за
малости Θ
, sin
Θ
заменяем на Θ.
M·g·a
– модуль маятникового момента.
 - ск-ть прецессии гирокомпаса под
воздействием маятникового момента.
- ск-ть прецессии гирокомпаса под
воздействием маятникового момента.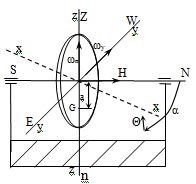

W
Гирокомпас чувствует меридиан (обладает направляющим моментом) вследствие суточного вращения Земли, т.к. главная ось ЧЭ получает наклон к плоскости горизонта, если он не находится в меридиане.
Основные св-ва гироскопа.
Способность сохранять неизменным направление главной оси в инерционном пространстве. Для своб. гироскопа сумма моментов всех внешн. сил =0, dH/dt=0 (*), т.е. Н-const. Но если Н постоянен по значению и направлению и совпадает с вектором собственной угловой ск-ти гироскопа Ω, т.е с направлением его главной оси, тогда главная ось гироскопа неизменна в пространстве.
У
 стойчивость
к воздействию кратковременных импульсов
силы. Перейдем
в выражении (*) к конечным приращениям.
ΔН/Δt=L;
ΔН=
L·
Δt.
При действии силы на гироскоп в течение
короткого промежутка времени имеем
очень малое значение Н. Делаем вывод,
что удары практически не изменяют
первоначального направления главной
оси.
стойчивость
к воздействию кратковременных импульсов
силы. Перейдем
в выражении (*) к конечным приращениям.
ΔН/Δt=L;
ΔН=
L·
Δt.
При действии силы на гироскоп в течение
короткого промежутка времени имеем
очень малое значение Н. Делаем вывод,
что удары практически не изменяют
первоначального направления главной
оси.Прецессия - движение главной оси гироскопа в плоскости, перпендикулярной направлению действия внешней силы. В прецессионном движении полюс гироскопа идет к полюсу момента внешней силы по кратчайшему пути.
HΧ= кинетич. момент гироскопа относительно его оси симметрии равен произведению осевого момента инерции ротора гироскопа на его собственную угловую скорость = JX·Ω. JX=M·R2/2