

4. Метод динамического программирования.
4.1. Принцип оптимальности
Рассмотрим систему
 (4.1)
(4.1)
и функционал
 (4.2)
(4.2)
который требуется минимизировать. Правый конец фазовых координат является свободным.
Наряду с этой вариационной задачей
рассмотрим вспомогательную, когда
процесс рассматривается в интервале
![]() и минимизируется функционал
и минимизируется функционал
 . (4.3)
. (4.3)
Пусть сначала найден минимум J (4.2) и соответствующее ему оптимальное управление (рис. 1а):
![]() (4.4)
(4.4)
а потом – минимум
![]() (4.3) и оптимальное управление (рис. 1б):
(4.3) и оптимальное управление (рис. 1б):
![]() . (4.5)
. (4.5)
В последнем случае предполагается, что
в момент
![]() процесс начинается с состояния
процесс начинается с состояния
![]() ,
достигнутого к моменту времени
при оптимизации процесса в интервале
,
достигнутого к моменту времени
при оптимизации процесса в интервале
![]() .
.
Вообще говоря, управления
![]() и
и
![]() отличаются интервалом и значениями.
Принцип оптимальности утверждает, что
оптимальные управления
и
в общей части интервала
отличаются интервалом и значениями.
Принцип оптимальности утверждает, что
оптимальные управления
и
в общей части интервала
![]() совпадают, не зависимо от предыстории
процесса и вполне определяются состоянием
совпадают, не зависимо от предыстории
процесса и вполне определяются состоянием
![]() в момент
в момент
![]() .
.
В случае со свободным правым концом принцип оптимальности доказывается. В самом деле, допустим, что на участке управления и не совпадают и
![]()
 . (4.6)
. (4.6)
Рис. 1а Рис.1б
Тогда для первой задачи введем управление
 (4.7)
(4.7)
и вычислим функционал
При управлении u (4.7)
функционал (4.2) принимает меньшее
значение, чем при
![]() (4.4). Но управление
является оптимальным. Поэтому допущение
(4.6) неверно.
(4.4). Но управление
является оптимальным. Поэтому допущение
(4.6) неверно.
A предположение

противоречит тому, что
![]() - управление, минимизирующее
- управление, минимизирующее
![]() (4.3).
(4.3).
Таким образом, остается, что
![]() ,
,
и если оптимальное управление единственное, то
![]() .
.
Кратко принцип оптимальности можно сформулировать так: последний участок оптимальной траектории является оптимальным независимо от предыстории процесса.
4.2. Основное уравнение метода динамического программирования
Применим принцип оптимальности к решению
вариационной задачи (4.1), (4.2). Для этого
сначала рассмотрим функционал
![]() (4.3). Наименьшее значение его при связях
(4.1) обозначим:
(4.3). Наименьшее значение его при связях
(4.1) обозначим:
 . (4.8)
. (4.8)
Если
![]() -
оптимальное управление,
-
оптимальное управление,
то
![]() .
.
Оптимальное управление
![]() зависит от начального состояния y(t)
в момент t. Следовательно,
v является функцией
от y и t:
v = v(y,
t), а от управления
u и его вариаций функция
v = v(y,
t) не зависит. Она
вполне определяется значениями y,
t .
зависит от начального состояния y(t)
в момент t. Следовательно,
v является функцией
от y и t:
v = v(y,
t), а от управления
u и его вариаций функция
v = v(y,
t) не зависит. Она
вполне определяется значениями y,
t .
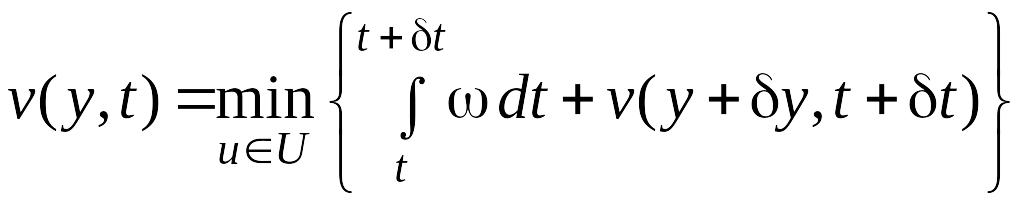
Интервал (t, T) разделим на два интервала (t, t + t) и (t + t, T) и выражение (4.8) запишем в виде:
 .
.
Согласно принципу оптимальности последний участок также является оптимальным:

Обозначим:
 , (4.10)
, (4.10)
где
![]() - приращение вектора фазовых координат
за время
- приращение вектора фазовых координат
за время
![]() .
Оно определяется согласно уравнениям
движения (4.1). Подставляя
.
Оно определяется согласно уравнениям
движения (4.1). Подставляя
![]() из (4.10) в равенство (4.9), получим:
из (4.10) в равенство (4.9), получим:
 .
.
Хотя функция
зависит только от фазовых координат и
времени, ее нельзя выносить за знак
![]() .
Значение приращения
за время
зависит от управления в интервале
.
Значение приращения
за время
зависит от управления в интервале
![]() .
Но
.
Но
![]() не зависит от управления в интервале
,
и ее можно внести под знак
.
Введем
под знак минимума и разделим на
:
не зависит от управления в интервале
,
и ее можно внести под знак
.
Введем
под знак минимума и разделим на
:
 .
.
Учитывая, что
 ;
;
![]() ,
,
получим основное уравнение метода динамического программирования:
 . (4.11)
. (4.11)
Это соотношение состоит из двух утверждений:
выражение
 достигает минимума. Это утверждение
служит для определения оптимального
управления
достигает минимума. Это утверждение
служит для определения оптимального
управления
 ;
;выражение при оптимальном управлении равняется нулю. Утверждение служит для определения функции
 .
.
Если - управление, минимизирующее выражение , то основное уравнение метода динамического программирования
 (4.12)
(4.12)
Здесь
![]() зависит от управления по определению,
функция же
зависит от управления по определению,
функция же
![]() не зависит от него. Тем не менее,
производная
не зависит от него. Тем не менее,
производная
![]() от управления зависит. В этом можно
убедиться, если ее представить в виде
от управления зависит. В этом можно
убедиться, если ее представить в виде
![]()
и yi’ заменить согласно системе (4.1):
![]()
![]() . (4.13)
. (4.13)
Подставляя (4.13) в (4.12) получим уравнение Р.Беллмана:
 . (4.14)
. (4.14)
Это уравнение в частных производных
относительно
![]() ,
которое после подстановки
,
которое после подстановки
![]() становится нелинейным. Согласно
определению v (4.8) при
становится нелинейным. Согласно
определению v (4.8) при
![]() должно выполняться конечное условие
должно выполняться конечное условие
![]() .
.
В случае бесконечного интервала при
![]() процесс должен быть асимптотически
устойчивым, т.е.
процесс должен быть асимптотически
устойчивым, т.е.
![]() .
.
В том случае, когда рассматривается функционал Больца
 (4.15)
(4.15)
Уравнение (4.12) сохраняет силу, функция v в момент должна удовлетворять условию
 . (4.16)
. (4.16)