

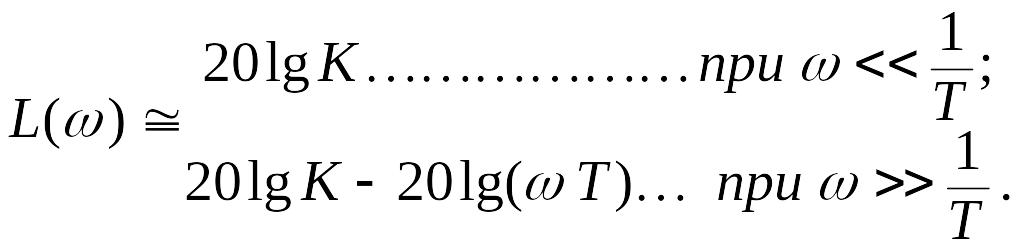
Лачх для дальнейшего удобно представить в следующем виде
![]() ,
,
что позволяет найти асимптотические составляющие этой характеристики:
Основные виды характеристик инерционного звена приведены на рис.2.6.
Переходная и весовая характеристики, как и любая экспонента, обладают следующим важным свойством: подкасательная равна постоянной времени T. Переходная характеристика за время t=T достигает значения 0,632 , а за t=3T - значения около 0,95 , т.е. переходный процесс практически заканчивается.
Анализ
АЧХ показывает, что инерционное звено
по своим частотным свойствам является
фильтром низкой частоты: при малых
частотах (![]() )
отношение амплитуд выходной и входной
величин близко к передаточному
коэффициенту
.
Чем больше постоянная времени, тем
меньше собственная частота
)
отношение амплитуд выходной и входной
величин близко к передаточному
коэффициенту
.
Чем больше постоянная времени, тем
меньше собственная частота
![]() (уже полоса пропускания частот).
(уже полоса пропускания частот).
Из
ФЧХ следует, что при частоте
сдвиг по фазе выходного сигнала от
входного равен – 450,
а максимально возможное отставание
равно 900.
В практических расчетах обычно используют
не фактическую, а асимптотическую ЛАЧХ.
Для инерционного звена, как это следует
из проведенного
анализа, асимптотическая
![]() представляет собой ломаную линию в
виде д
представляет собой ломаную линию в
виде д вух
асимптот: в области низких частот
вух
асимптот: в области низких частот
![]() ,
а в области высоких частот
,
а в области высоких частот
![]() .
Обе асимптоты сопрягаются при частоте
,
которая называется собственной частотой
апериодического звена. Наибольшая
ошибка, получающаяся от приближенной
замены точной ЛАЧХ
.
Обе асимптоты сопрягаются при частоте
,
которая называется собственной частотой
апериодического звена. Наибольшая
ошибка, получающаяся от приближенной
замены точной ЛАЧХ
![]() двумя асимптотическими линиями, не
превышает 3
двумя асимптотическими линиями, не
превышает 3![]() при
=
с.
при
=
с.

 h
T
A
h
T
A
K K А( )
0,63K
h(t)
![]()
0
t
![]()

 L
W
L
W
20lgK
![]()
L(
)
-20![]() W(t)
W(t)
![]() T
T

![]() jV
K
jV
K
=0
![]()
-45
W(j )
- 90
![]()
![]()
Рис.2.6 Характеристики инерционного звена
Инерционными звеньями описываются элементы, которые способны передавать и накапливать энергию или вещество. Накопителем электрической энергии может служить конденсатор, магнитной – индуктивность, механической – упругие элементы, кинетической – движущиеся массы.
Простейшими примерами апериодического звена первого порядка являются четырехполюсники (рис.2.7.), состоящие из резистора сопротивлением r (Ом) и конденсатора емкостью C (Ф) или индуктивности L (Гн). Используя закон Ома и заменяя на получим для первого четырехполюсника (рис.2.7,а):
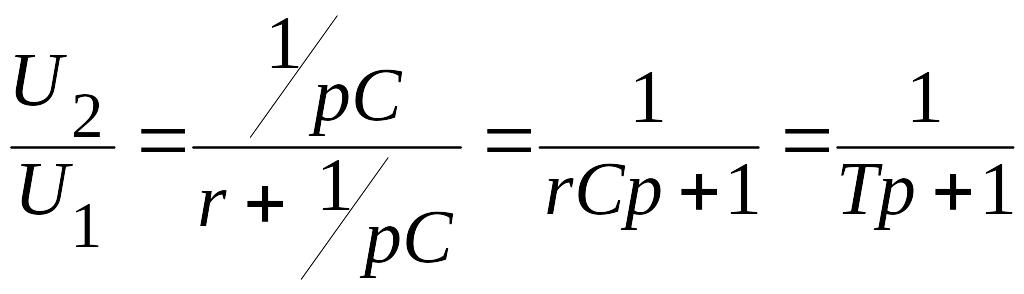 .
.
Аналогично для второго четырехполюсника (рис.2.7, б)
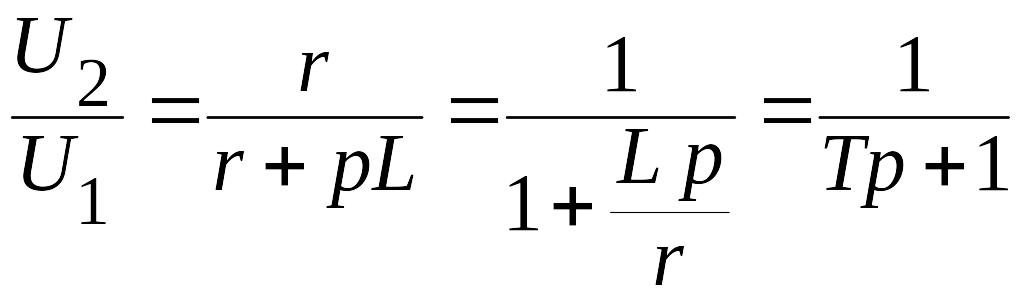 .
.
Постоянные
времени
![]() и
и
![]() измеряются в секундах.
измеряются в секундах.
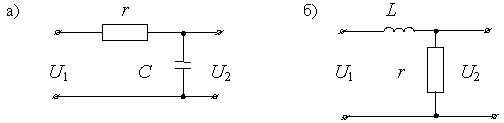
Рис.2.7 Примеры апериодического звена первого порядка
В
качестве третьего примера рассмотрим
сосуд, в который поступает нерегулируемый
расход
![]() ,
а расход
,
а расход
![]() вытекает из сосуда через регулируемый
вентиль. Расход
зависит от уровня жидкости
вытекает из сосуда через регулируемый
вентиль. Расход
зависит от уровня жидкости
![]() в сосуде и положения вентиля
в сосуде и положения вентиля
![]() ,
т.е.
,
т.е.
![]() .
.
Составим уравнение баланса жидкости в сосуде:
![]() –
–
![]() ,
,
где
![]() –
поверхность зеркала жидкости в сосуде.
–
поверхность зеркала жидкости в сосуде.