

§3.3 Методы оценки качества переходного процесса
В устойчивой системе переходные процессы затухают. С практической точки зрения важно, чтобы затухание происходило за заданное время и при этом выходной сигнал не выходил за определенные значения. Эти и другие требования, характеризующие точность системы в переходных режимах, оценивают при помощи прямых и косвенных показателей.
Прямые
показатели качества могут использоваться
для характеристики свободного и
вынужденного движений системы. Ниже
рассматриваются прямые показатели
качества вынужденных процессов управления
применительно к типовой одноконтурной
системе (рис.2.16а). Прямые показатели
вынужденных процессов определяются
при типовых воздействиях
![]() ,
нулевых предначальных условиях и зависят
от расположения полюсов и нулей
передаточной функции исследуемого
канала.
,
нулевых предначальных условиях и зависят
от расположения полюсов и нулей
передаточной функции исследуемого
канала.
Свободное движение определяется корнями характеристического полинома и начальными условиями. Требования к расположению корней характеристического полинома на комплексной плоскости, при выполнении которых имеет место определенный тип и параметры процессов, называются корневыми показателями качества.
Для оценки качества свободных движений систем с обратной связью используются и частотные характеристики разомкнутого контура. Амплитудно-частотные или вещественные частотные характеристики замкнутых систем по каналу воспроизведения задания применяются для оценки вынужденных процессов управления.
Частотные и корневые показатели относятся к косвенным показателям качества. Особую группу показателей составляют интегральные оценки, позволяющие наиболее сжато (одним числом) охарактеризовать исследуемый процесс.
Прямые показатели качества. Характер переходного процесса зависит от свойств системы и места приложения внешнего воздействия (рис. 2.16а). Переходные характеристики по каналам воспроизведения задания v(t) (рис.3.11а) и подавления возмущения f(t) (рис.3.11б) разделяют на колебательные (кривые 1), монотонные (кривые 2) и апериодические (кривые 3). В отдельных случаях переходной процесс может протекать без перерегулирования, но иметь колебательный характер (кривая 4 на рис.3.11 а).
В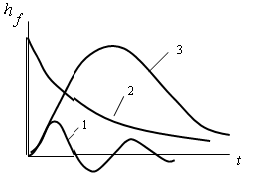 ыбор
типа переходного процесса должен
выполняться с учетом особенностей
объекта управления. Например, колебательный
процесс нежелателен для электромеханических
объектов со сложной кинематикой, так
как при этом возникают знакопеременные
нагрузки, ускоряется износ элементов
объекта. Если кратковременные отклонения
выходных координат
ыбор
типа переходного процесса должен
выполняться с учетом особенностей
объекта управления. Например, колебательный
процесс нежелателен для электромеханических
объектов со сложной кинематикой, так
как при этом возникают знакопеременные
нагрузки, ускоряется износ элементов
объекта. Если кратковременные отклонения
выходных координат
а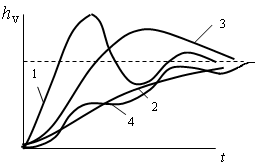 )
б)
)
б)
Рис. 3.11. Основные формы переходных процессов:
а) – по заданию; б) – по возмущению.
от
установившихся значений мало сказываются
на качестве работы объекта, то предпочтение
отдают колебательному процессу.
Колебательный процесс берут за основу
при определении прямых показателей
качества переходного процесса (рис.
3.12). Переходные характеристики по заданию
![]() и по возмущению
и по возмущению
![]() ,
показанные на рис. 3.12 а,б, построены для
статических систем (в астатических
системах
,
показанные на рис. 3.12 а,б, построены для
статических систем (в астатических
системах
![]() ).
).
a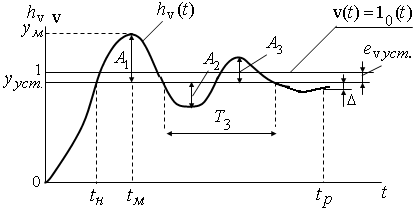 )
)
б )
)
![]()
![]()
![]()
1
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() t
t
0
![]()
Рис. 3.12. Прямые показатели качества по задающему воздействию (а)
и по каналу возмущения (б).
К прямым показателям качества относят:
1.
Время регулирования
– минимальное время, по истечении
которого регулируемая величина будет
отклоняться от установившегося значения
![]() не более, чем на допустимую величину .
В промышленной автоматике обычно
принимают
= 0.05
не более, чем на допустимую величину .
В промышленной автоматике обычно
принимают
= 0.05![]() ,
т.е. 5% от
.
,
т.е. 5% от
.
В
качестве временных показателей качества
помимо
используют (рис. 3.12 а): время нарастания
![]() ,
время достижения первого максимума
,
время достижения первого максимума
![]() и период затухания
и период затухания
![]() .
.
2.
Перерегулирование по каналу управления
(%) – это отношение первого максимального
отклонения управляемой переменной
![]() от ее установившегося значения
от ее установившегося значения
![]() к этому установившемуся значению (рис.
3.12 а):
к этому установившемуся значению (рис.
3.12 а):
 .
.
Перерегулирование
по возмущению на выходе объекта
определяется (рис.3.12 б) величиной
![]() или как отношение второго максимального
отклонения
или как отношение второго максимального
отклонения
![]() к первому максимальному отклонению
к первому максимальному отклонению
![]() :
:
 .
.
Перерегулирование
и максимальное отклонение
(рис.3.12 а) и
![]() (рис.3.12 б) характеризуют склонность САУ
к колебаниям и, следовательно, запас
устойчивости. Обычно
(рис.3.12 б) характеризуют склонность САУ
к колебаниям и, следовательно, запас
устойчивости. Обычно
![]() %, но может достигать 50-70 %. Иногда
требуется, чтобы процесс был монотонным
%, но может достигать 50-70 %. Иногда
требуется, чтобы процесс был монотонным
![]() .
.
3.
Динамический коэффициент регулирования
![]() (%) равен отношению первого максимального
отклонения
к отклонению выходной переменной объекта
в установившемся режиме
(рис.3.12, б):
(%) равен отношению первого максимального
отклонения
к отклонению выходной переменной объекта
в установившемся режиме
(рис.3.12, б):
 .
.
Этот коэффициент характеризует эффективность компенсирующего действия регулятора на объект управления.
4. Степень затухания (рис. 3.12 а):
 .
.
Если
![]() =
0.75 ... 0.95, то затухание колебаний в системе
считается удовлетворительным.
=
0.75 ... 0.95, то затухание колебаний в системе
считается удовлетворительным.
5. Колебательность переходного процесса определяется числом максимумов или минимумов кривой переходного процесса в интервале от 0 до . Иногда колебательность оценивают отношением амплитуд соседних максимумов
 ,
,
где
![]() – период колебаний;
– период колебаний;
![]() – частота колебаний;
– частота колебаний;
![]() – действительная и мнимая части
– действительная и мнимая части
![]() -го
корня характеристического уравнения
-го
корня характеристического уравнения
![]() .
.
П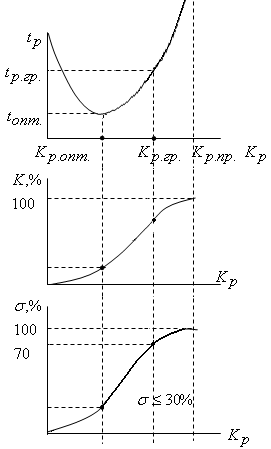 оказатели,
определяющие развитие процесса во
времени
оказатели,
определяющие развитие процесса во
времени
![]() ,
и показатели, характеризующие
колебательность процесса
,
и показатели, характеризующие
колебательность процесса
![]() ,
взаимосвязаны. Влияние структуры и
параметров системы на указанные группы
показателей противоречиво. Зависимость
времени регулирования, колебательности
и перерегулирования от коэффициента
передачи разомкнутой статической
системы
,
взаимосвязаны. Влияние структуры и
параметров системы на указанные группы
показателей противоречиво. Зависимость
времени регулирования, колебательности
и перерегулирования от коэффициента
передачи разомкнутой статической
системы
![]() качественно показано на рис.3.13. По мере
увеличения
до некоторого значения
качественно показано на рис.3.13. По мере
увеличения
до некоторого значения
![]() время регулирования уменьшается,
достигая значения
время регулирования уменьшается,
достигая значения
![]() ,
а колебательность и перерегулирование
возрастают. При дальнейшем увеличении
вплоть до его предельного значения
,
а колебательность и перерегулирование
возрастают. При дальнейшем увеличении
вплоть до его предельного значения
![]() ,
соответствующего границе устойчивости,
колебательность возрастает до 100
%. Время регулирования
также растет. В качестве граничного
значения
,
соответствующего границе устойчивости,
колебательность возрастает до 100
%. Время регулирования
также растет. В качестве граничного
значения
![]() принят процесс, при котором
принят процесс, при котором
![]() .
.
С увеличением коэффициента передачи
разомкнутого контура (рис. 3.12 б) всегда уменьшается.
Поиск рационального компромисса между показателями, определяющими
б
Рис.3.13 Влияние
коэффициента передачи разомкнутой
системы на показатели качества
переходного процесса.
Частотные
показатели.
Для оценки качества переходного процесса
используют удобные для решения задач
анализа и синтеза САУ частотные
показатели, определяемые по характеристикам
замкнутого и разомкнутого контура
системы. Наибольшее распространение
получили следующие показатели: частотный
показатель колебательности
,
запасы устойчивости по модулю и фазе,
а также резонансная (собственная) частота
,
полоса пропускания системы
и частота среза
![]() .
.
Показатель
колебательности
– это отношение максимального значения
амплитудно-частотной характеристики
![]() замкнутой системы к ее значению при
частоте, равной нулю,
замкнутой системы к ее значению при
частоте, равной нулю,
![]() (рис. 3.14):
(рис. 3.14):
![]() .
.
Учитывая,
что в астатических системах
![]() ,
в статических системах
,
в статических системах
![]() ,
,
![]() ,
где
– резонансная частота, то
,
где
– резонансная частота, то
![]() .
.
Показатель колебательности характеризует склонность системы к колебаниям. Чем больше , тем больше перерегулирование (колебательность) и время регулирования . Обычно считается допустимым, если 1.1 1.5.
АФХ разомкнутой системы не должна заходить внутрь окружности, соответствующей максимально допустимому значению М.
Полоса
пропускания системы (рис. 3.14) – это
интервал частот от
до
,
при котором выполняется условие
![]() .
Полоса пропускания не должна быть
слишком широкой, иначе система будет
воспроизводить высокочастотные помехи.
.
Полоса пропускания не должна быть
слишком широкой, иначе система будет
воспроизводить высокочастотные помехи.
Частота
среза
![]() качественно характеризует время
регулирования
качественно характеризует время
регулирования
![]() и определяется как частота, при которой
и определяется как частота, при которой
![]() .
.
Если
переходная характеристика имеет один,
два максимума, то время достижения
первого максимума
![]() .
.
Запасы
устойчивости по амплитуде
![]() и фазе
и фазе
![]() определяются по AФX
W(j)
разомкнутого контура (рис. 3.15, а) и
характеризуют удаленность кривой W(j)
от критической точки [-1, j0]:
определяются по AФX
W(j)
разомкнутого контура (рис. 3.15, а) и
характеризуют удаленность кривой W(j)
от критической точки [-1, j0]:
![]() ;
;
![]() .
.
![]()
Рис.3.14
Амплитудно–частотная
характеристика
замкнутой системы![]()
![]()
0
![]()
![]()
![]()

Рис. 3.15 Запасы устойчивости системы
Удовлетворительное качество процесса управления имеет место при
![]() и
и
![]() .
.
Опытом
настроек установлено, что для нормальной
работы многих САУ необходимо обеспечить
следующие запасы устойчивости:
![]() .
Достаточность этих рекомендаций для
конкретной САУ необходимо проверять
методом моделирования.
.
Достаточность этих рекомендаций для
конкретной САУ необходимо проверять
методом моделирования.
Запасы устойчивости должны выбираться с учетом возможного изменения параметров САУ в процессе эксплуатации.
При
использовании частотных характеристик
в логарифмических координатах, (рис.
3.15, б) запас устойчивости по амплитуде
определяется по выражению
![]() .
.
В
хорошо демпфированных системах запас
устойчивости по амплитуде колеблется
в пределах
![]() дБ.
Значениям
соответствует
дБ.
Значениям
соответствует
![]() дБ.
дБ.
На основе гипотезы об эквивалентности динамических свойств замкнутой системы по каналу управления свойствам колебательного звена:
 (3.17)
(3.17)
можно оценить прямые показатели качества без использования переходной характеристики.
В
принятой структуре модели коэффициент
передачи равен 1 (для астатических
систем) или близок к 1 (для статических
систем) и предполагается, что коэффициент
демпфирования
![]() .
.
Амплитудно-частотная
характеристики модели
![]() обычно близка к характеристике системы
обычно близка к характеристике системы![]() ,
если (см. рис. 3.14)
,
если (см. рис. 3.14)
![]() ,
,
![]() ,
,
![]() .
.
С помощью такого подхода реальный контур регулирования можно описать простыми формулами колебательного звена.
В
диапазоне часто используемых на практике
значений
![]() ,
которым соответствуют показатели
колебательности
,
которым соответствуют показатели
колебательности
![]() ,
справедливы следующие простые выражения:
,
справедливы следующие простые выражения:
![]() ,
,
![]() ,
,
![]() ,
,
 .
.
Приведенные приближенные зависимости связывают показатели качества замкнутой системы с параметрами ее модели.
Для решения обратной задачи (задачи синтеза) необходимо параметры замкнутой системы оценить по характеристикам ее разомкнутой части Wрк(p).
Простейшим разомкнутым контуром, образующим при замыкании колебательное звено, является реальное интегрирующее звено
 .
.
Выбранной
Wрк(p)
соответствует
следующая передаточная функция замкнутого
контура .
.
Выразим
параметры колебательного звена Т
и ,
записанного в стандартной
форме (3.17), через Т1
и К:
 ,
,
 .
.
Из полученных зависимостей следует:
частота
собственных незатухающих колебаний
![]() замкнутой системы, характеризующая
инерционность системы, возрастает с
увеличением коэффициента передачи К
разомкнутого контура и уменьшением его
постоянной времени Т1;
колебательность замкнутой системы,
характеризуемая величиной
замкнутой системы, характеризующая
инерционность системы, возрастает с
увеличением коэффициента передачи К
разомкнутого контура и уменьшением его
постоянной времени Т1;
колебательность замкнутой системы,
характеризуемая величиной
![]() ,
возрастает с ростом произведения КT1.
,
возрастает с ростом произведения КT1.
Для
приближенной оценки показателей качества
системы по известным параметрам ее
разомкнутого контура можно использовать
следующие простые зависимости:
![]() ,
,
![]() ,
,
![]() ,
,
 ,
,
![]() ,
,
![]() ,
,
 .
.
Эти
формулы дают достаточную для инженерных
расчетов точность в диапазоне
![]() ,
который соответствует значениям
.
,
который соответствует значениям
.
Грубую
оценку tр
можно получить, используя только
![]() :
:
 .
.