

Розрізняють
два роди балансування: статичне і
динамічне. Обертове тіло буде статично
збалансоване, коли центр маси тіла
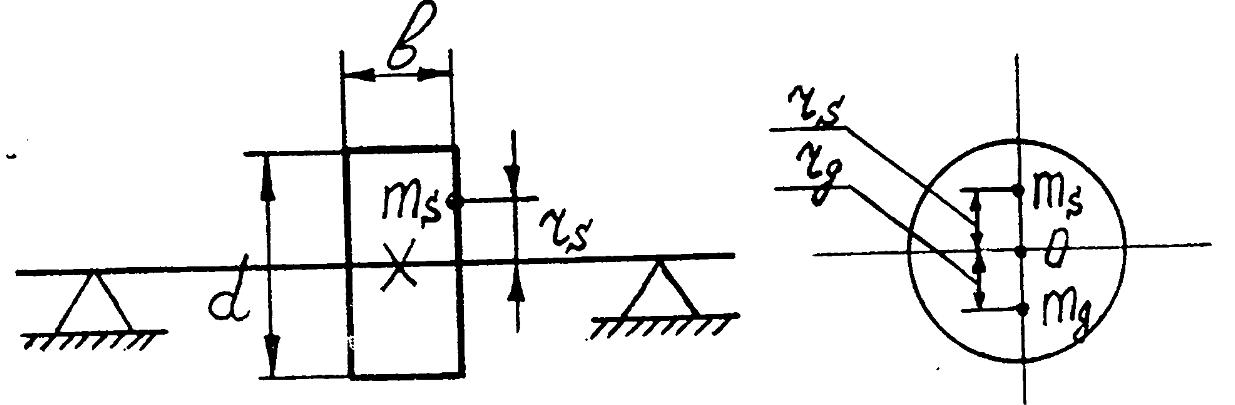
лежатиме на осі обертання. Щоб
збалансувати тіло статично, його
ставлять цапфами на дві паралельні
лінійки /рис.8.5/. У
зв'язку з тим, що центр мас тіла лежить
на осі, яка віддалена від осі обертання
тіла на відстані rS,
то сила ваги тіла намагатиметься
повернути його в таке положення, при
якому його центр мас стане в найнижче
положення. Підбираючи додатковий тягар,
розміщений на плечі r
від осі обертання, завжди можна добитись
стану байдужої рівноваги тіла на
лінійках. Умова статично збалансованого
тіла
Статичне
балансування Статичне
балансування проводиться для роторів,
в яких ширина о набагато менша
діаметра d,
в ≤ 0.2d,
а також тіл обертання з невеликою
кутовою швидкістю n<
200 об/хв. Для
барабанів, усяких роторів, коліс
автомобіля, які мають значну кутову
швидкість, необхідне динамічне
балансування, бо навіть незначний
дисбаланс створює великі динамічні
зусилля на підшипники. Вісь обертання
динамічно збалансованого тіла стає
головною центральною віссю інерції. У
цьому випадку головний вектор і головний
момент пар сил інерції обертового тіла
дорівнює нулю, тобто:
89. Статичне і динамічне балансування тіл обертання.
![]()
![]()
![]()
90.
Віброзахист машин. Ідеально
зрівноважити ланки механізму неможливо.
Рух таких ланок викликає змінні за
величиною і напрямом сили, котрі
викликають коливання /вібрації/
машини. Амплітуда А
коливань тим більша, чим ближче власна
частота Р коливань ланки до частоти ω
коливань незрівноваженої сили. При
ω=
р
виникає резонанс, який супроводиться
різким збільшенням амплітуди А
.Вібрації
можуть привести до зруйнування елементів
машин і фунда-мента, чинять шкідливий
вплив на людину.Вібрації можуть бути
і корисними. Їх використовують для
пересування вантажів /вібраційні
транспортери/, заглиблення паль,
підвищення продуктив-ності обробки
деяких матеріалів.Для зменшення
амплітуди вібрацій іноді використовують
демпфери, в яких сила опору залежить
від швидкості /рис.8.6/. Чим більше
демпфування, тим менша амплітуда
коливань.Розрізняють два основні
методи. боротьби з вібраціями -
віброізоляція і віброгашення. Прикладом
віброізоляції може служити підвіска
автомобіля. Він немов би ізольований
ресорами і пневматичними шинами від
більшості нерівностей шляху. На
рис.8.6 зображена динамічна модель
віброізольованої системи.
Машина
масою т,
установлена на фундамент /основу/ за
допомогою аморти-затора з приведеною
жорсткістю С
і приведеним коефіцієнтом демпфування
υ
.
Віброізольована
система.

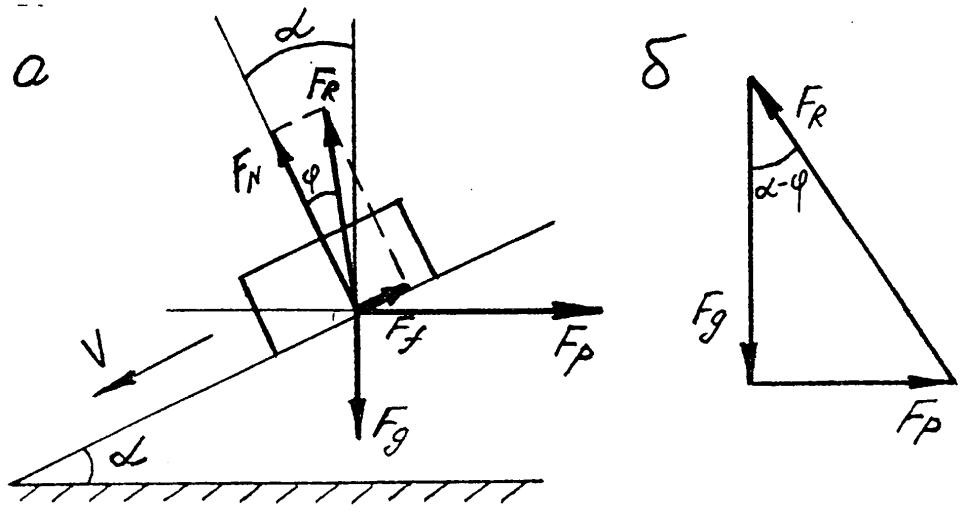
63.Тертя
на похилій площині. Розглянемо
випадок, коли тіло 1 рухається рівномірно
донизу /рис.6.7,а/. В
цьому разі побудова відрізняється від
попередньої тим, що сила тертя Ff
напрямлена
вверх, а повна реакція FR
відхиляється
на кут тертя φ,
не ліворуч від нормалі /рис. 6.6, а/, а
праворуч від неї /рис.6.7,а/.Для цього
випадку досить у формулах /6.14/ і /6.15/
замінити кут φ
на –φ.
Тоді будемо мати:
Тіло
на похилій площині.
а
- переміщення тіла донизу; б
- план сил
Рис.
6. 7 Рівняння
/6.17/ також випливає із /рис. 6.7, б/. При
відсутності тертя /кут φ
=
0/ рівняння /6.7/ набере вигляду:
![]()
![]()
![]()