

26 Методи обробки сигналу у рем
Ряд методик оброблення сигналу, таких як: зворотного контрасту; диференційного підсилення; нелінійного підсилення; диференціювання сигналу; змішування сигналу; Y-модуляцію та ін.
Зворотний
контраст.
У
багатьох РЕМ є пристрій обертання
контрасту. Це досягається завдяки
відніманню від певного фіксованого
значення вхідного сигналу (Sвх).
Це повинно відповідати максимальному
сигналу Smax
![]()
У результаті ділянки, що спостерігалися світлими та темними, будуть зображатися темними та світлими відповідно
Обертання контрасту використовують коли природа сигналу від детектора така, що контраст має протилежний знак.
Диференційне підсилення. Однією з проблем є коли зразок дає слабкий вихідний сигнал. При переході від однієї компоненти до іншої не простежується чіткої межі. У таких випадках використовують диференційне підсилення.
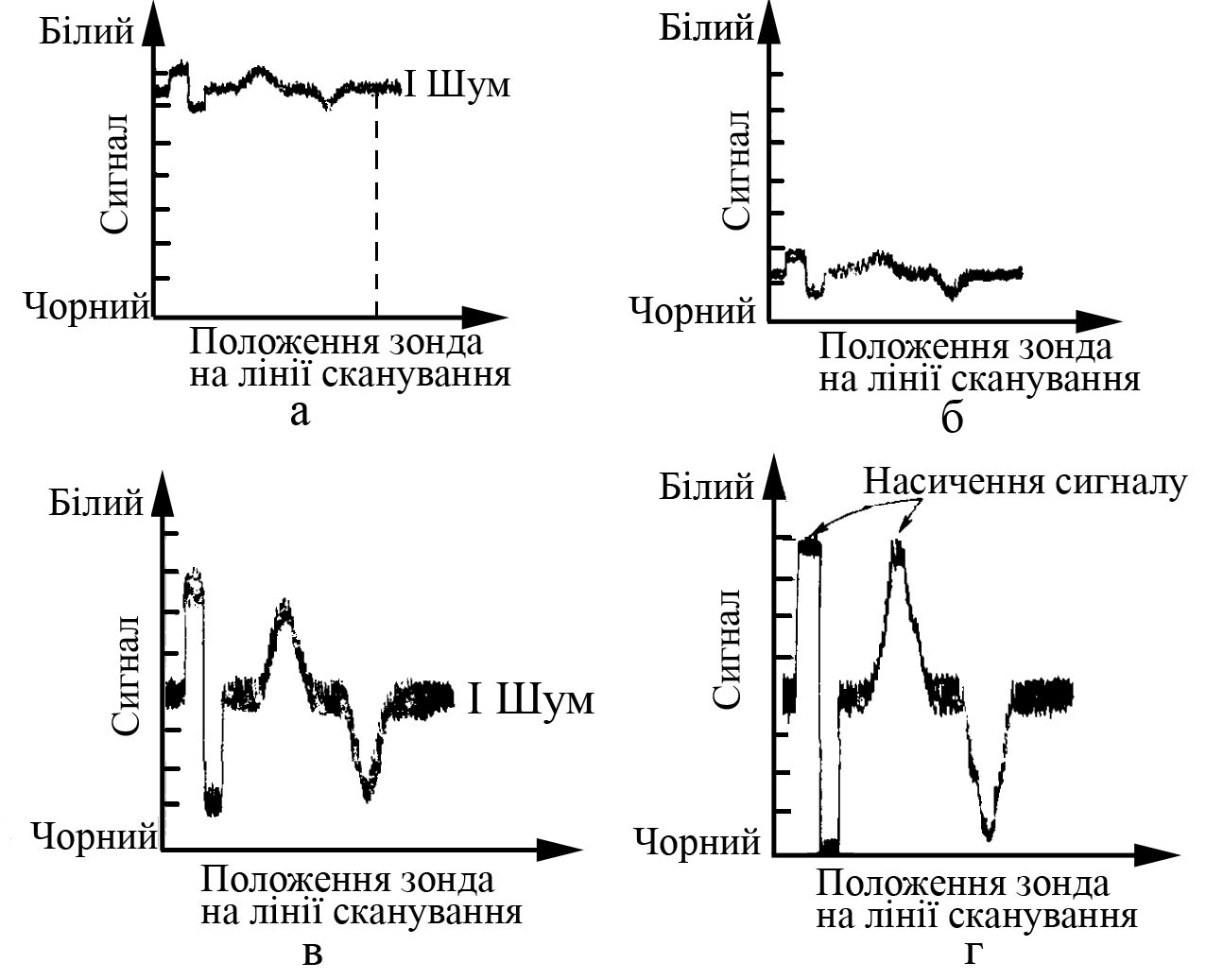
Позиція (а) відповідає сигналу, що створюється слабим вихідним контрастом. При обробці сигналу спочатку від нього віднімають постійний фіксований рівень, у результаті чого отримують сигнал, наведений на позиції (б), а потім здійснюють лінійне підсилення (в). Недолік методу- можна отримати насичені абсолютно білим або абсолютно чорним сигнали, що призводить до часткової втрати інформації (позиція (г)).
Диференціювання сигналу–це метод оброблення, який дозволяє підкреслити високочастотні компоненти на зразку та згладити низькочастотні. У цьому випадку вхідний сигнал диференціюється за часом і на виході подається як Sвих=dSвх/dt. Операція диференціювання ефективна лише в тому випадку, коли відношення сигнал/шум істотне.
Змішування
сигналів.
Кінцевий сигнал на екрані ЕПТ може
являти собою суму сигналів, наприклад,
від двох детекторів. Можна скомбінувати
їх таким чином, щоб вихідний сигнал
визначався за співвідношенням![]() де
a>0,
b<1.
де
a>0,
b<1.
Завдяки другому доданку контраст на краях буде підсилений, а перший доданок відповідає за збереження загальної інформації про об’єкт.
Y-модуляція. При формуванні зображення на зразку розгортка по осях х та у здійснюється за допомогою відповідного генератора.
С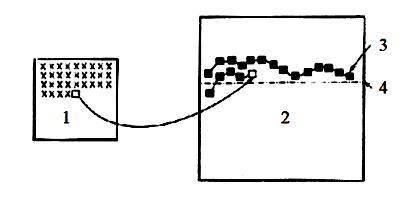 хема
утворення зображення у режимі Y-модуляції:
1, 2 - області сканування по зразку та по
екрану ЕПТ; 3 -сигнал від попереднього
сканування F(x,y,t),
4 - положення горизонтального рядка
хема
утворення зображення у режимі Y-модуляції:
1, 2 - області сканування по зразку та по
екрану ЕПТ; 3 -сигнал від попереднього
сканування F(x,y,t),
4 - положення горизонтального рядка
На екрані ЕПТ положення точки по горизонталі визначається горизонтальним положенням при скануванні впродовж лінії. Положення по вертикалі на екрані визначається величиною сигналу у кожній конкретній точці. Тобто відхилену котушку у напрямку у подають сигнали від генератора розгортки та сигнал від одного із детекторів.
На результуючому зображенні інтенсивність сигналу буде фактично однаковою, а воно – істотним чином деформоване через відсутність однозначної відповідності між сітками на зразку та екрані. Цінність Y-модуляції полягає у тенденції підсилювання дрібномасштабної структури, яка мо-же поліпшити видимість рельєфу поверхні зразка.
27 Поняття про ідеальне зображення. Аберації 3-го порядку Ідеальне, або гаусівське, зображення
Розглянемо ідеальний випадок, а саме: коли використовується об’єктивна лінза без аберацій, об’єкт аморфний, падаючий пучок електронів паралельний та монохроматичний, а довжина хвилі електрона дорівнює нулю. Рух таких електронів у полі магнітної лінзи згідно з класичними уявленнями описується за допомогою сили Лоренца
![]() ,
,
де e,
![]() – заряд та
швидкість електрона;
– заряд та
швидкість електрона;
![]() – індукція магнітного поля.
– індукція магнітного поля.
Сила Лоренца, яка діє на заряд з боку магнітного поля лінзи, перпендикулярна до напряму руху електрона. З цієї причини у магнітному полі змінюється лише напрям його руху (нахил траєкторії до оптичної осі лінзи). Швидкість електрона у цьому випадку не змінюється.
Рівняння руху
електрона під дією електричного (з
напруженістю
![]() )
і магнітного полів має вигляд
)
і магнітного полів має вигляд
![]() де z
– зміщення електрона. До розв’язку
рівняння входить sinα
(α
− кут між миттєвим напрямком швидкості
та оптичною віссю мікроскопа), який
можна розкласти у ряд
де z
– зміщення електрона. До розв’язку
рівняння входить sinα
(α
− кут між миттєвим напрямком швидкості
та оптичною віссю мікроскопа), який
можна розкласти у ряд
![]()
Якщо кут α малий, то sin α ≈ α. Наближення, для якого виконується ця умова, отримало назву діоптрики Гаусса, а пучки, для яких вона виконується, – парааксіальних пучків.
У випадку парааксіальних пучків зображення, створене лінзою, точно і без дефектів відповідає об’єкту. Точки у площині зображення не розмиті. Зображення, сформоване парааксіальними пучками, отримало назву ідеального, або гаусівського.
Закони, за якими отримується зображення в ідеальній системі, можуть бути застосовані до реальної в тому випадку, якщо область поширення променя близька до оптичної осі. Для розширення поля зору мікроскопа та забезпечення високої яскравості зображення у реальних оптичних системах використовуються пучки діаметром 1-5 мкм., які відхиляються від умов парааксіальності. Внаслідок цього в рівнянні руху потрібно врахувати другий член, що приводять до виникнення аберації третього порядку(астигматизм та сферична аберація). Траєкторія руху електрона, прискореного електричним полем, у полі магнітної лінзи являє собою гвинтову лінію, яка лежить у прямому круглому циліндрі, вісь якого збігається з оптичною віссю лінзи. З цієї причини в електронному мікроскопі спостерігається поворот зображення стосовно об’єкта.
![]()
![]()
Хід променя в ідеальній лінзі: 1 - простір об’єкта; 2 - простір зображення; 3 - предметна площина; 4 - досконала лінза; 5 - задня фокальна площина; 6 - площина гаусівського зображення; 7 - оптична вісь z; F1, F2 - головні фокуси лінзи; f1, f2 - фокальні відстані; Lо, Lз - відстань до площин об’єкта й зображення відповідно; Хоі, Хзі - відстань від оптичної осі до спряжених точок об’єкта й зображення відповідно