

Синтез цифровых фильтров Аналоговые фильтры
Различают два общих класса сигналов: аналоговые и дискретные. Аналоговым сигналом называется сигнал, определенный для каждого момента времени. Дискретным сигналом - сигнал, определенный только в дискретные моменты времени.
Как дискретный, так и аналоговый сигналы могут быть однозначно представлены некоторыми функциями частоты, которые называются их частотными спектрами.
Фильтрацией называется процесс изменения частотного спектра сигнала в некотором желаемом направлении. Этот процесс может привести к усилению или ослаблению частотных составляющих в некотором диапазоне частот, к подавлению или выделению какой-нибудь конкретной составляющей и т.п.
![]()
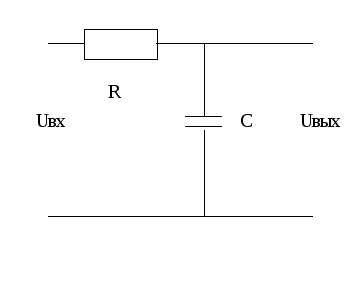
![]() Рассмотрим
аналоговый НЧ-фильтр.
Рассмотрим
аналоговый НЧ-фильтр.
Импульсная
характеристика:
![]() (1)
(1)
Отфильтрованный
сигнал:
![]()
Переходя
к дискретному времени
![]() получим:
получим:![]()
Ограничивая
сумму до N и изменяя свертку получается
КИХ-фильтр:
![]()
Рассмотрим
z-преобразование данного уравнения:
![]() ,
где
,
где![]() .
Подставим (1)
.
Подставим (1)
Следовательно
 ,
проводя обратное z-преобразование
получаем
,
проводя обратное z-преобразование
получаем![]() - это рекурсивный фильтр.
- это рекурсивный фильтр.
Цифровые фильтры и их свойства.
Цифровым фильтром называется цифровая система, которую можно использовать для фильтрации дискретных сигналов. Он может быть реализован программным методом или с помощью специальной аппаратуры, и в каждом из этих случаев цифровой фильтр можно применить для фильтрации сигналов в реальном времени или для фильтрации предварительно записанных сигналов.
Цифровой фильтр можно представить структурной схемой, изображенной на рис.1. На этой схеме x(n) и y(n) - соответственно входное воздействие и реакция фильтра на это воздействие. Функционально они связаны соотношением :
![]()
где
вид оператора
![]() зависит от свойств конкретной системы.
зависит от свойств конкретной системы.
![]()
рис.1.
Реакцию цифрового фильтра на произвольное воздействие можно представить с помощью импульсной характеристики фильтра. Допустим, что x(n) - входная , а y(n) - выходная последовательности фильтра, и пусть h(n) - отклик на единичный импульс, называемый импульсной характеристикой. Тогда
![]()
Таким образом, x(n) и y(n) связаны соотношением типа свертки.
Частотная характеристика фильтра определяется следующим выражением:
![]() (1.0)
(1.0)
Поскольку
частотная характеристика является
периодической функцией частоты w,
равенство (1.0) можно рассматривать как
разложение
![]() в ряд Фурье, причем коэффициенты являются
одновременно отсчетами импульсной
характеристики. Согласно теории рядов
Фурье, коэффициенты h(n)
могут быть выражены через
в ряд Фурье, причем коэффициенты являются
одновременно отсчетами импульсной
характеристики. Согласно теории рядов
Фурье, коэффициенты h(n)
могут быть выражены через
![]() :
:
![]()
Из
этого соотношения видно, что h(n)
по существу является суперпозицией
синусоид
![]() с амплитудами
с амплитудами
![]() .
.
![]() можно
представить следующим образом:
можно
представить следующим образом:
![]()
![]() называют
амплитудной характеристикой фильтра,
а
называют
амплитудной характеристикой фильтра,
а
![]() -
фазовой характеристикой фильтра.
-
фазовой характеристикой фильтра.
Свойства цифровых фильтров.
1. Цифровой фильтр называется стационарным, если его параметры не изменяются во времени, т.е. предварительно невозбужденный фильтр, в котором x(n)=y(n)=0 при всех n<0 называют стационарным тогда и только тогда, когда
![]()
для всех возможных воздействий.
2. Цифровой фильтр называют линейным тогда и только тогда, когда
![]()
для всех a и b - произвольных постоянных и всех допустимых воздействий x1(n) и x2(n).
3. Цифровой фильтр называют физически реализуемым, если величина отклика при n=n0 зависит только от значений входной последовательности с номерами n£n0. Это означает, что импульсная характеристика h(n) равна нулю при n<0.
4. Цифровой
фильтр называется устойчивым тогда и
только тогда, когда реакция на ограниченное
воздействие ограничена, т.е. если из
![]() при всех n
следует
при всех n
следует
![]() при всех n.
Необходимым и достаточным условием
устойчивости фильтра является следующее
требование к его импульсной характеристике:
при всех n.
Необходимым и достаточным условием
устойчивости фильтра является следующее
требование к его импульсной характеристике:
![]() .
.
Один наиболее важных классов линейных инвариантных относительно сдвига систем описывается разностным уравнением
![]() , (2.11)
, (2.11)
где x(n)– выборки входной последовательности; y(n)– выборки выходной последовательности, а a(k)иb(k)– коэффициенты, определяющие систему или, точнее, фильтр. Вz-области система (2.11) может быть представлена своей передаточной функциейH(z):
![]() . (2.12)
. (2.12)
В случае,
когда b(0)=1; b(k)=0,
![]() ,
выборки на выходе фильтра зависят лишь
от входных выборок без какого-либо
обратного влияния предыдущих выборок
на текущие. Такие фильтры называются
КИХ-фильтрами. Если по крайней мере один
из коэффициентовb(k) при
,
выборки на выходе фильтра зависят лишь
от входных выборок без какого-либо
обратного влияния предыдущих выборок
на текущие. Такие фильтры называются
КИХ-фильтрами. Если по крайней мере один
из коэффициентовb(k) при
![]() отличен от нуля, то такие фильтры
называются фильтрами сбесконечной
импульсной характеристикой (БИХ).
отличен от нуля, то такие фильтры
называются фильтрами сбесконечной
импульсной характеристикой (БИХ).