

Применяемое оборудование и приборы.
Для исследования параметров вибрации и эффективности виброизоляций используется вибростенд, блок питания и прибор ВИП-2. Схема установки показана на рис. 6.1.
1. Вибростенд 1 состоит из электродвигателя постоянного тока с эксцентриком на валу, жестко закрепленного на платформе 2 и закрытого кожухом. Платформа установлена на фундаменте 3 и соединена с ним чрез пружинные 4 и резиновые 5 амортизаторы. Четырьмя прижимными гайками 6 платформа может быть установлена в трех положениях: на пружинные амортизаторы, на резиновые амортизаторы и жестко связана с фундаментом (амортизация выключена). Установка платформы в одном из трех положений контролируется указателями 7. С блоком питания стенд соединяется кабелем 14.
2. Блок питания 8 предназначен для питания вибростенда постоянным током пониженного, изменяемого по величине напряжения.
На панели установлен включатель 9, регулятор напряжения 11, амперметр 12, предохранитель, индикатор напряжения 13, выходные клеммы, штепсельный разъем 10.
3. Измерения производятся измерителем вибрации ВИП-2. Принцип измерения заключается в преобразовании механической энергии в электрическую с помощью пьезокварцевого вибродатчика.
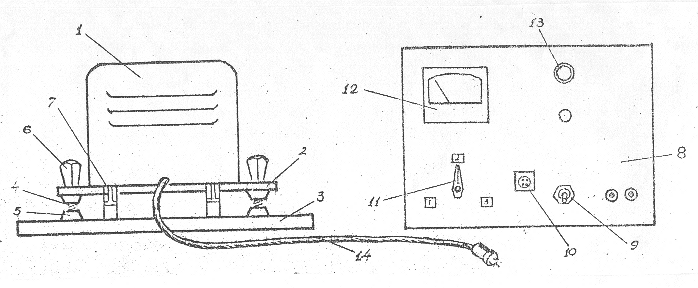
Рис.6.1. Лабораторный стенд
Порядок выполнения работы.
Подготовить установку к работе (произвести внешний осмотр).
Соединить вибростенд 1 с блоком питания 8 кабелем 14.
Подключить блок питания к электрической сети 220 В
Подсоединить пьезокварцевый датчик к прибору ВИП-2.
Установить регулятор напряжения 11 блока питания в положение 1 (первая скорость вибростенда).
Произвести пробное включение установки и проверить точки «1», «2», «3» на вибростенде, включив прибор ВИП-2 на измерение скорости «ММ/S» продолжительность включения не более 1 мин.
Отпустить прижимные гайки амортизаторов 6 так, чтобы платформа вибростенда опиралась на пружины амортизаторов 5.
Произвести измерения виброскорости транспортной вибрации в точках «1», «2», «3» .Результаты занести в таблицу измерений 6.1. Выключить питание вибратора.
Переключить прибор ВИП-2 в положение измерения амплитуды транспортной вибрации. (Переключатель в положение Мм).
Произвести измерение амплитуды транспортной вибрации в точки «1», «2», «3» и в точках «1.1», «2.1», «3.1». Результаты занести в таблицы 6.1 и 6.2.
Аналогичные измерения произвести в точках «2», «2.1», «3», «3.1». Результаты занести в таблицу измерений 6.1, 6.2. В таблицу 6.2 заносятся только измерения амплитуды вибрации!
Выключить блок питания.
Перенести пьезокварцевый датчик в точку «1».
Переключить блок питания вибратора в положение «2».
Произвести измерение виброскорости в точках «1», «1.1», «2», «2.1», «3», «3.1» на второй скорости вибростенда (положение переключателя блока питания «2». Результаты занести в таблицу 6.1.
Выключить блок питания.
Перенести пьезокварцевый датчик в точку «1».
Переключить прибор ВИП –2 в положение для измерения амплитуды вибрации (переключатель прибора ВИП-2 в положение Мм).
Произвести измерение амплитуды транспортной вибрации в точках «1», «1.1», «2», «2.1», «3», «3.1» на второй скорости вибростенда (переключатель скоростей вибростенда в положение «2»). Результаты занести в таблицы 1 и 2.
Выключить блок питания.
Перенести пьезокварцевый датчик в точку «1».
Переключить блок питания вибростенда в положение «3».
Произвести измерение виброскорости транспортной вибрации в точках «1», «1.1», «2», «2.1», «3», «3.1» на третьей скорости вибростенда (положение переключателя на блоке питания «3»). Результаты измерения занести в таблицу 6.1.
Выключить блок питания.
Перенести пьезокварцевый датчик в точку «1».
Произвести измерение амплитуды транспортной вибрации в точках «1», «1.1», «2», «2.1», «3», «3.1» на третьей скорости вибростенда (положение переключателя блока питания «3»). Результаты занести в таблицы 1,2.
Выключить блок питания.
Отдать гайки крепления вибростенда к платформе. Поднять вибростенд. Удалить пружины у амортизаторов. Установить вибростенд на резиновые опоры. Завинтить гайки, не прижимая их.
Произвести измерения на резиновых опорах, аналогичные измерениям п.п. 5.2.2……5.2.21. Результаты измерений занести в таблицы результатов.
Выключить блок питания установки.
Отдать гайки крепления вибростенда к платформе. Поднять вибростенд. Удалить резиновые опоры. Завинтить гайки.
Произвести измерения на металлических опорах, аналогично п.п. 5.2.2……..5.2.21. Результаты измерений занести в таблицу 6.1 и таблицу 6.2.
Расчетный метод определения виброскорости, виброускорения, частоты вращения вала (угловой скорости).
Произвести расчеты:
Виброскорости по формуле:
V = π F A (м/с) формула 14
Где: V – виброскорость, м/с
F – частота, Гц
Частоты вращения вала вибратора на «1», «2», «3» скоростях. Частоту находим из формулы виброскорости:
V
F = ------------- (Гц) формула 15
2 π A
Результаты занести в таблицу результатов.
Виброускорения по формуле:
α = (2 π F)2 · А (м/с2) формула 16
Результаты занести в таблицу результатов.
Рассчитать коэффициент передачи по формуле:
Fф αф 1
КП = ------ = ------ = ----------- формула 10 F α (ƒ/ƒ)2 – 1
где αф – ускорение, действующее на фундамент
Fф - сила, действующая на фундамент
ω
ƒ = ------ (Гц) - частота возмущающей силы.
2 π
n · m
ƒ = --------- (Гц) формула 17
60
n – частота вращения, об/мин;
m – номера гармоники (1).
При выполнении лабораторной работы следует обратить внимание на состояние изоляции кабелей, исправность розеток, вилок, разъемов. При обнаружении неисправности работу прекратить и доложить преподавателю.
Таблицы результатов
Таблица 1
Вид амортизации |
Положение регулятора напряжения |
Точка замера |
Показания прибора |
Коэффициент передачи, КП |
||||
фундамент |
платформа |
V (mm/S) |
A (Mm) |
|||||
Пружинная |
1 |
1 |
1.1 |
1.7 |
3.2 |
26 |
55 |
0, 652744 |
2 |
2.2 |
1.1 |
1.5 |
24 |
28 |
|||
3 |
3.3 |
2.2 |
3.1 |
36 |
50 |
|||
2 |
1 |
1.1 |
1.7 |
3.6 |
26 |
54 |
0,5871251 |
|
2 |
2.2 |
1.3 |
1.7 |
20 |
20 |
|||
3 |
3.3 |
2.1 |
2.9 |
32 |
44 |
|||
3 |
1 |
1.1 |
2.1 |
4.2 |
30 |
59 |
0,6355043 |
|
2 |
2.2 |
1.5 |
1.9 |
14 |
24 |
|||
3 |
3.3 |
2.4 |
3.9 |
28 |
44 |
|||
Резиновая |
1 |
1 |
1.1 |
1.4 |
1.4 |
28 |
20 |
0,9196993 |
2 |
2.2 |
1.8 |
2.9 |
22 |
60 |
|||
3 |
3.3 |
2 |
1.7 |
32 |
30 |
|||
2 |
1 |
1.1 |
1.8 |
1.3 |
26 |
19 |
1,1307869 |
|
2 |
2.2 |
2.5 |
3.1 |
34 |
42 |
|||
3 |
3.3 |
2.5 |
1.4 |
40 |
21 |
|||
3 |
1 |
1.1 |
1.8 |
1.9 |
26 |
29 |
1,1962113 |
|
2 |
2.2 |
2.5 |
2.8 |
36 |
42 |
|||
3 |
3.3 |
2.9 |
1.4 |
44 |
20 |
|||
Отсутствует |
1 |
1 |
1.1 |
1 |
0.7 |
19 |
6 |
0,0914745 |
2 |
2.2 |
2 |
2.8 |
37 |
56 |
|||
3 |
3.3 |
2 |
1.75 |
35 |
27 |
|||
2 |
1 |
1.1 |
1 |
1 |
17 |
14 |
0,7539389 |
|
2 |
2.2 |
2.2 |
4 |
39 |
75 |
|||
3 |
3.3 |
2.1 |
2.1 |
32 |
30 |
|||
3 |
1 |
1.1 |
1.5 |
2.9 |
34 |
42 |
0,7699444 |
|
2 |
2.2 |
3.1 |
5.2 |
18 |
80 |
|||
3 |
3.3 |
3 |
2.9 |
36 |
20 |
|||
Вывод:
В данной лабораторной работе мы исследовали производственные вибрации и методы борьбы с ними, изучили общие понятия о вибрации, влияние вибрации на организм человека, способы измерения и метод ее исследования. Определили параметры вибраций и эффективность виброизоляции.
Мы произвели измерения виброскорости и амплитуды транспортной вибрации в точках «1», «2», «3», «1.1», «2.2», «3.3» для трех видов амортизации: пружинные опоры, резиновые опоры и отсутствие опор.
Для выяснения какой вид амортизации и в каком положение регулятора напряжения лучше для организма человека, мы сравним коэффициенты передачи.
Смотря на таблицу 2, мы видим, что все КП в норме, т.е. меньше единицы, но самый лучший показатель для положения регулятора напряжение «1» это пружинная опора.
Вид амортизации |
Положение регулятора напряжения |
Коэффициент передачи, КП |
Пружинная |
1 |
0, 652744 |
Резиновая |
1 |
0,9196993 |
Отсутствует |
1 |
0,0914745 |
Таблица 2
Из таблицы 3 следует, что была допущена ошибка, при снятие показаний виброскорости или амплитуды в положение регулятора 2, вида амортизации - резиновая опора, поэтому коэффициент передачи превышает норму. Самые лучшие показания у вида амортизации – пружинная опора.
Вид амортизации |
Положение регулятора напряжения |
Коэффициент передачи, КП |
Пружинная
|
2 |
0,5871251 |
Резиновая
|
2 |
1,1307869 |
Отсутствует
|
2 |
0,7539389 |
Таблица 3
Вид амортизации |
Положение регулятора напряжения |
Коэффициент передачи, КП |
Пружинная
|
3 |
0,6355043 |
Резиновая
|
3 |
1,1962113 |
Отсутствует
|
3 |
0,7699444 |
Таблица 4
Смотря на таблицу 4, как и в таблице 3, мы обратим внимание в первую очередь, на превышение нормы для КП, это резиновая опора в положение регулятора 3. Скорее всего, была допущена ошибка при снятие показаний, поэтому рассчитав, мы получили превышение значения нормы коэффициента передачи, равного единице. Из данных нам на рассмотрение результатов, четко видно, что самый лучший результат у вида амортизации - пружинная опора, в положение регулятора 3.
Общий вывод: лучший вид амортизации – это пружинная опора, во всех положениях регулятора напряжения.