

Лекция 6. СИСТЕМЫ ТЕЛЕМЕХАНИКИ И ПЕРЕДАЧИ ДАННЫХ
6.1. Основные понятия телемеханики
В рассмотренных ранее САУ все составляющие их элементы были пространственно сосредоточены, расстояние между ними существенного влияния на работу системы не оказывало и разделить ее на составные части можно было лишь по функциональным признакам.
Иначе обстоит дело, когда управляющее устройство и объект управления расположены достаточно далеко друг от друга. Например, в АСУП расстояние между пунктом управления (ПУ), где сосредоточена аппаратура управления, и контролируемым пунктом (КП), где размещен ОУ, может составлять от десятков метров до десятков километров и более, а в космических системах телеуправления это расстояние достигает тысяч и миллионов километров.
В этих случаях окружающая физическая среда оказывает очень сильное мешающее воздействие на передаваемые между ПУ и КП сигналы. Чтобы снизить влияние помех до допустимого уровня и обеспечить работоспособность таких систем, необходимо согласовать параметры передаваемых сигналов с параметрами среды, по которой они распространяются. Для этого передаваемые сигналы подвергают специальным преобразованиям.
Область науки и техники, охватывающая теорию и технические средства контроля и управления объектами на расстоянии посредством специальных преобразований сигналов, называется телемеханикой.
Для осуществления преобразований сигналов используют специальные передающие и приемные устройства. Совокупность приемопередающих устройств и физической среды, обеспечивающая материальное соединение ПУ и КП между собой, образует линию связи (рис. 13.3). Таким образом, принципиальная особенность систем телемеханики заключается в наличии линии связи. Роль линии связи настолько велика, что ее параметры являются определяющими для параметров всей телемеханической системы: точности, быстродействия, дальности действия, надежности и стоимости.
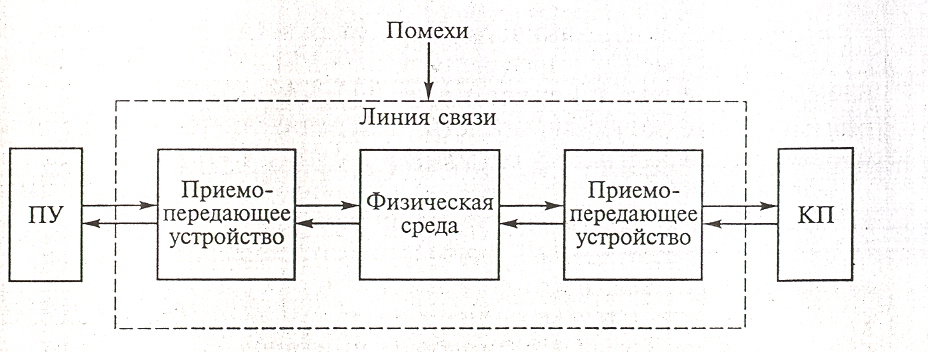
Рис.6.1. Структурная схема телемеханической системы.
Источниками передаваемой по линии связи информации на КП могут быть различные датчики, машинные носители информации, передающие телевизионные трубки, различные устройства ручного ввода (кнопки, клавиатура), периферийные ЭВМ, а на ПУ - устройства ручного ввода, расположенные на пульте, с которого осуществляется управление, центральная ЭВМ и машинные носители.
Получателями информации на КП могут быть различные исполнительные устройства, периферийные ЭВМ и машинные носители, а на ПУ - устройства индикации различного рода, расположенные на пульте управления, центральная ЭВМ и машинные носители.
Системы телемеханики обеспечивают управление из одного ПУ большим числом КП, расположенных самым различным образом и на самых различных расстояниях.
Соответственно могут различаться и соединяющие их линии связи. В зависимости от взаимного расположения ПУ и КП линии связи могут быть с радиальной, цепочечной и древовидной структурами (рис. 6.2).

Рис.6.2. Линия связи радиальной (а), цепочечной (б)
и древовидной (в) структур
Современные телемеханические системы обеспечивают взаимодействие в рамках одной большой системы многих сотен и даже тысяч ПУ и КП. В этом случае говорят уже не об отдельных линиях связи, соединяющих ПУ с КП, а о сетях связи. Оптимизация структуры таких сетей связи по времени передачи сигналов, надежности, стоимости и другим параметрам является весьма сложной задачей.
В больших телемеханических системах возникает задача передачи сигналов между определенной парой ПУ и КП, т.е. от конкретного источника к конкретному получателю информации. Совокупность технических средств, обеспечивающих независимую передачу сигналов между одним ПУ и одним КП, называется каналом связи. Таким образом, канал включает в себя линию (или сеть) связи и каналообразующую аппаратуру.