

5. Оценка устойчивости, управляемости, наблюдаемости системы
Устойчивость характеризует свойство системы возвращаться в исходное состояние равновесия или вынужденного движения после снятия внешнего воздействия на систему.
На основе методов, разработанных А.М.Ляпуновым, можно утверждать, что линейная стационарная динамическая система устойчива, если:
все собственные числа матрицыА имеют отрицательные значения;
все собственные числа с нулевыми вещественными частями (если таковые имеются) являются некратными корнями.
Таким образом, чтобы определить устойчивость исследуемой системы, необходимо найти корни характеристического полинома. Для этого используем системуMatLab:
» p=[1 28 604 8637 73574 314464 473018]
» roots(p)
ans =
-1.6646 +16.3370i
-1.6646 -16.3370i
-7.4816 + 5.5442i
-7.4816 - 5.5442i
-6.6790
-3.0287
Корни характеристического полинома имеют отрицательные значения, следовательно, система устойчива.
Управляемость характеризует принципиальную возможность изменения состояния системы с помощью внешних воздействий.
Для проверки управляемости и наблюдаемости динамической системы существуют аналитические критерии, разработанные Р.Калманом.
Для того чтобы динамическая система была полностью управляемой необходимо и достаточно, чтобы матрица управляемости системы
![]()
имела
ранг равный ![]() .
.
Найдем матрицу управляемости исследуемой системы и определим ее ранг в системеMatLab:
» A=[-500 0 0 0 0 -5000;-24 0 0 -0.6 -0.36 -300;0 1600 -200 0 0 0;0 0 150 -50 -37.5 0;0 0 0 166.67 0 0;0 0 0 0 0.013 0]
» B=[5000 0.05 0 0 0 0]
» R=[BA*B (A^2)*B (A^3)*B (A^4)*B (A^5)*B]
» rank(R)
ans =
5
Ранг матрицы управляемости не равен порядку системы, следовательно, система управляема частично.
Наблюдаемость характеризует принципиальную возможность определения состояния системы по наблюдениям за ее выходными сигналами.
Для того чтобы динамическая система была полностью наблюдаемой необходимо и достаточно, чтобы матрица наблюдаемости системы
![]()
имела ранг равный .
Найдем матрицу наблюдаемости исследуемой системы и определим ее ранг в системеMatLab:
» cT=[0;0;0;0;0;1]
» aT=A'
» Q=[cTaT*cT (aT^2)*cT (aT^3)*cT (aT^4)*cT (aT^5)*cT]
» rank(Q)
ans =
6
Так как ранг матрицы наблюдаемости равен порядку системы, исследуемая система является полностью наблюдаемой.
6. Получение переходной характеристики системы в среде matlab
Передаточная функция система имеет вид:
![]() (6.
1)
(6.
1)
Найдем переходную характеристику в среде MATLAB:
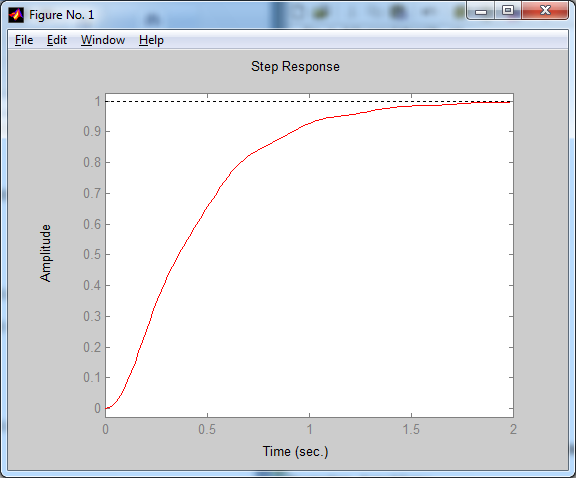
Рисунок 6. 0 – Переходная характеристика системы
7. Получение переходных характеристик системы в среде Simulink
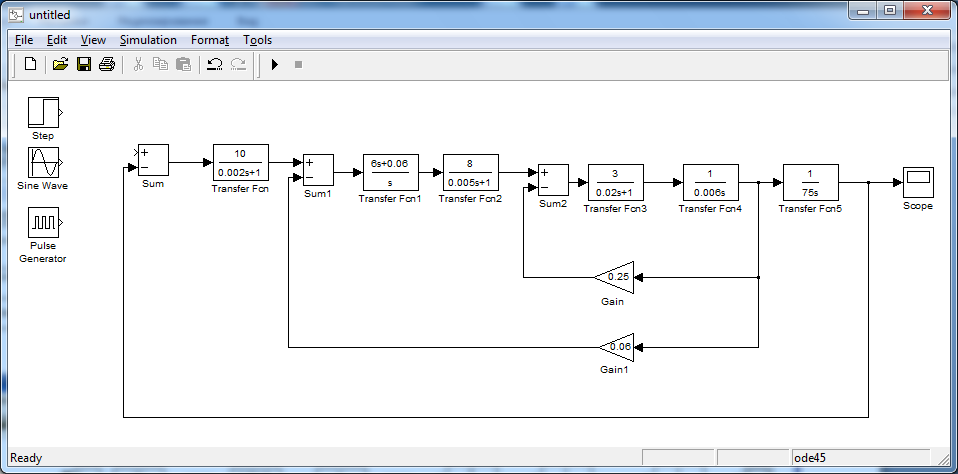
Получим переходные характеристики системы в среде Simulink. Схема системы и реакции на единичный ступенчатый, гармонический и импульсный сигналы изображены на Рисунках 7. 0 – 7. 3.
 Рисунок
7. 0 – Схема системы
Рисунок
7. 0 – Схема системы

Рисунок 7. 1 – Реакция системы на единичный ступенчатый сигнал

Рисунок 7. 2 – Реакция системы на гармонический сигнал
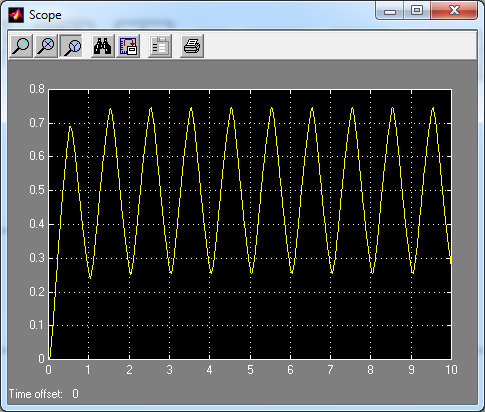
Рисунок 7. 3 – Реакция системы на импульсное воздействие
Полученная реакция системы на единичный ступенчатый сигнал совпала с полученной в среде MATLAB.
Заключение
Для заданной в виде структурной схемы системы автоматического управления на примере электромеханического привода промышленного манипулятора были выбраны переменные состояния, сформированы уравнения состояния в пространстве состояний. Получена эквивалентная передаточная функция системы с помощью МАTLAB. Получена фробениусова каноническая форма уравнений состояния. Получена жорданова каноническая форма уравнений состояния. Оценена устойчивость, управляемость, наблюдаемость исследуемой САУ. Система устойчива, частично управляема, полностью наблюдаема. Получена переходная характеристика с помощью MATLAB. Получены графические изображения реакций САУ при одиночных и последовательностях трапецеидального, импульсного и гармонического сигналов. Полученная реакция системы на единичный ступенчатый сигнал совпала с полученной в среде MATLAB.
Список использованной литературы
1.″Моделирование и анализ динамических систем″. Учебное пособие. Асанов А.З. Издательство Камского политехнического института, Набережные Челны, 2004
2.″Методы анализа динамических систем″. Методические указания к самостоятельной работе студентов. Асанов А.З. Издательство Камского политехнического института, Набережные Челны, 1991
3. ″Цифровое моделирование и анализ динамических систем″. Лабораторный практикум. Асанов А.З. Кампи, УГПИ. Издательство Камского политехнического института, Набережные Челны, Уфа, 2004
4. ″Метод пространства состояний в задачах анализа динамических систем″. Учебное пособие. Асанов А.З. Издательство Камского политехнического института, Набережные Челны, 1992