

Содержание
Содержание 2
Задание на расчетно-графическую работу 2
1. Получение математической модели в форме пространства состояний 4
2. Получение эквивалентной передаточной функции системы 7
3. Получение фробениусовой КФ уравнения состояния 9
4. Получение жордановойКФ уравнения состояния 10
5. Оценка устойчивости, управляемости, наблюдаемости системы 12
6. Получение переходной характеристики системы в среде MATLAB 14
7. Получение переходных характеристик системы в среде Simulink 15
Заключение 18
Список использованной литературы 19
Задание на расчетно-графическую работу
Для заданной в виде структурной схемы системы автоматического управления на примере электромеханического привода промышленного манипулятора:
1. Выбрать переменные состояния, сформировать уравнения состояния в пространстве состояний.
2. Получить эквивалентную передаточную функцию системы с помощью МАTLAB.
3. Получить фробениусову каноническую форму уравнений состояния.
4. Получить жорданову каноническую форму уравнений состояния.
5. Оценить устойчивость, управляемость, наблюдаемость исследуемой САУ.
6. Получить переходную характеристику с помощью MATLAB.
7. Получить графические изображения реакций САУ приодиночных трапецеидального, импульсного и гармонического сигналов. Полученная реакция системы на единичный ступенчатый сигнал должна совпасть с полученной в среде MATLAB.
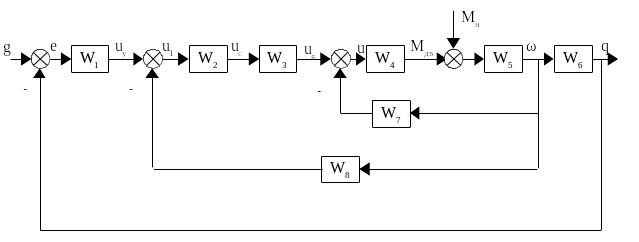
Рисунок 1 – Структурная схема электромеханического привода манипулятора
Таблица 1 – Параметры элементов электромеханической системы
Передаточные функции |
Исходные данные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Получение математической модели в форме пространства состояний
Пусть
![]()
Тогда
![]() (1.
1)
(1.
1)
![]() (1.
2)
(1.
2)
![]() (1.
3)
(1.
3)
![]() (1.
4)
(1.
4)
![]() (1. 5)
(1. 5)
![]() (1. 6)
(1. 6)
![]() (1. 7)
(1. 7)
![]() (1. 8)
(1. 8)
![]() (1.
9)
(1.
9)
![]() (1.
10)
(1.
10)
![]() (1.
11)
(1.
11)
![]() (1.
12)
(1.
12)
![]() (1. 13)
(1. 13)
![]() (1. 14)
(1. 14)
![]() (1. 15)
(1. 15)
![]() (1.
16)
(1.
16)
![]() (1.
17)
(1.
17)
![]() (1.
18)
(1.
18)
![]() (1.
19)
(1.
19)
![]() (1.
20)
(1.
20)
![]() (1.
21)
(1.
21)
![]() (1.
22)
(1.
22)
Таким образом, уравнения состояния имеют вид:
 (1. 23)
(1. 23)
Уравнение выхода:
![]() (1.
24)
(1.
24)
Подставив числовые коэффициенты, получим математическую модель в форме пространства состояний:
 (1. 25)
(1. 25)
Векторно-матричная запись уравнений (1. 25) имеет вид:
![]() (1. 26)
(1. 26)
2. Получение эквивалентной передаточной функции системы
Приведем структурную схему привода манипулятора к одноконтурному виду.
![]() (2. 1)
(2. 1)
![]() (2. 2)
(2. 2)
Преобразованная схема изображена на Рисунке 2. 0.
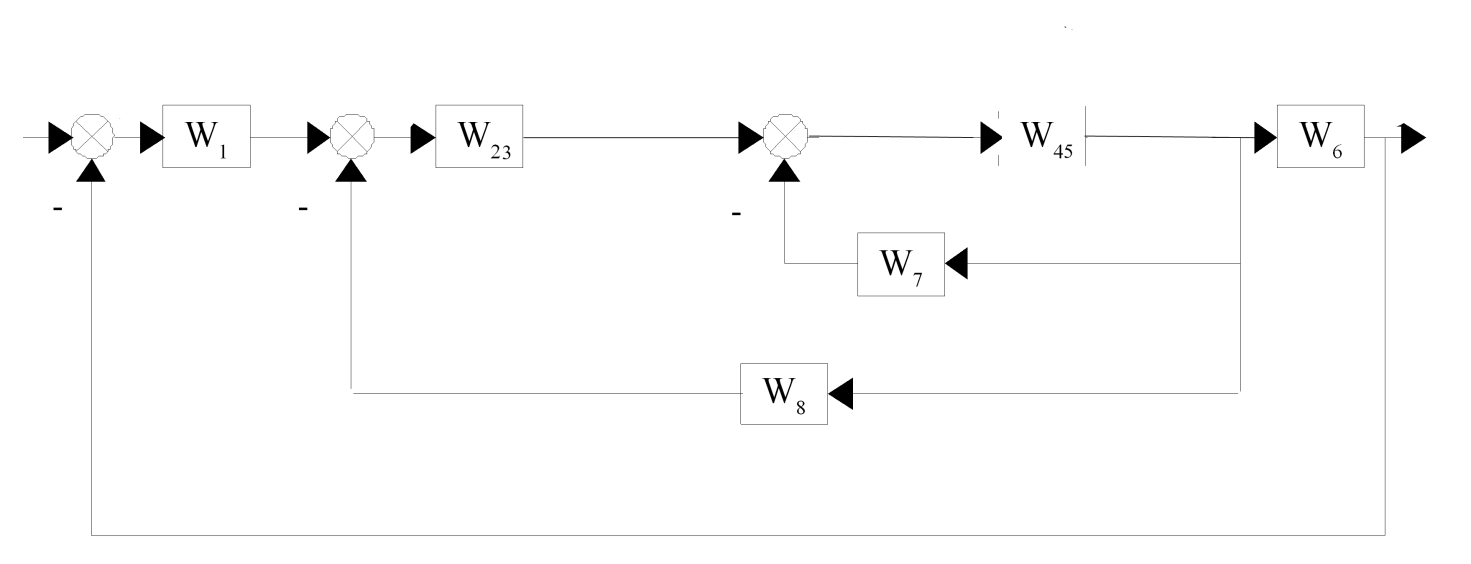
Рисунок 2. 0 – Преобразованная схема
![]() (2. 3)
(2. 3)
Преобразованная схема изображена на Рисунке 2. 1.
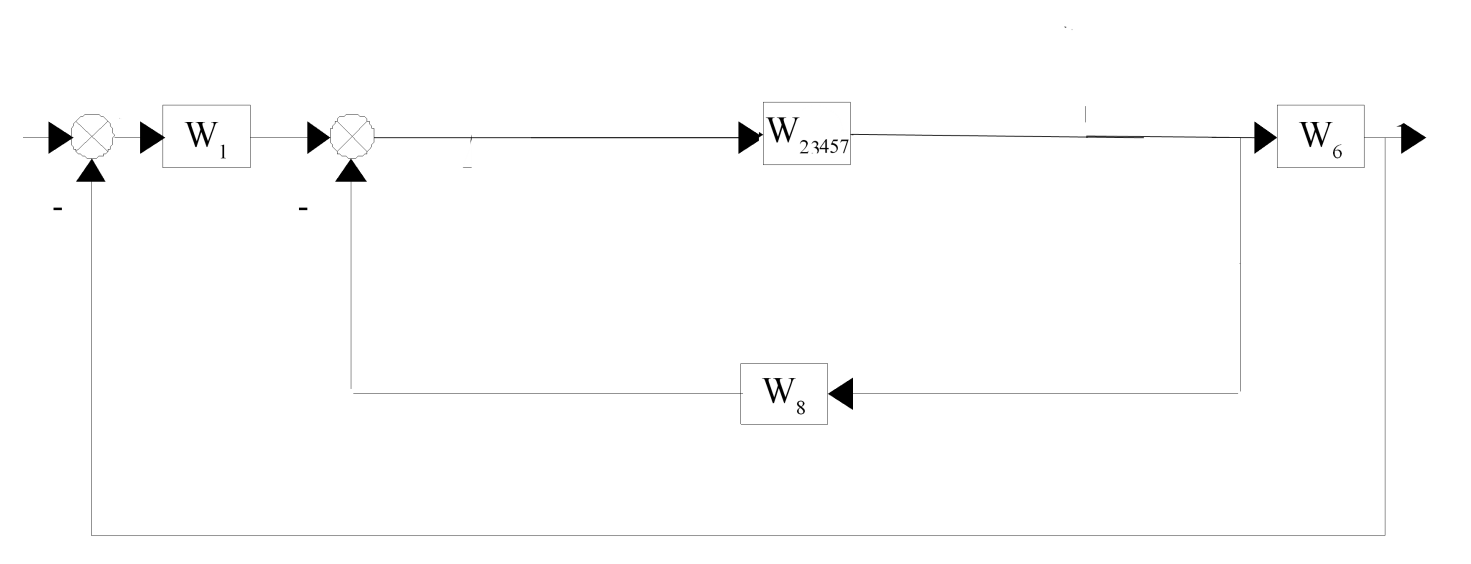
Рисунок 2. 1 – Преобразованная схема
![]() (2.
4)
(2.
4)
Преобразованная схема изображена на Рисунке 2. 2.
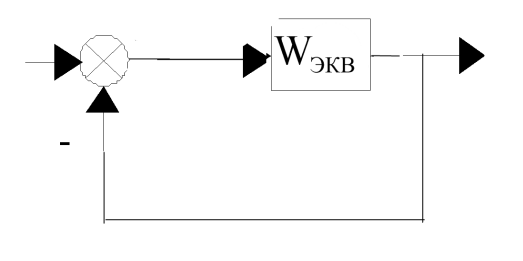
Рисунок 2. 2 – Преобразованная схема
![]() (2. 5)
(2. 5)
Эквивалентная передаточная функция системы:
![]() (2. 6)
(2. 6)
3. Получение фробениусовой кф уравнения состояния
Основу реализации фробениусовой канонической формы составляет цепочка последовательно включенных интеграторов, охваченными обратными связями, причем, коэффициенты обратных связей совпадают с коэффициентами характеристического полинома динамической системы.
В эквивалентной передаточной функции произведем замену оператора Лапласа производными от переменной z:
![]() (3. 1)
(3. 1)
![]() (3. 2)
(3. 2)
Выразив из (3. 1)
![]() ,
подставив в (3. 2) и произведя замену
,
подставив в (3. 2) и произведя замену
![]() ,
получим фробениусову каноническую
форму:
,
получим фробениусову каноническую
форму:
![]() (3. 3)
(3. 3)
Векторно-матричная запись уравнений (3. 3) имеет вид:
![]() (3. 4)
(3. 4)
Построим граф строчной управляемой канонической формы:
4. Получение жордановойКф уравнения состояния
Суть жордановой канонической формы состоит в разложении исходной системы на независимые параллельные подсистемы. При этом сумма порядков подсистем равняется общему порядку системы, а такое представление в целом удобно для анализа динамики системы и исследования ее свойств.
Разложим передаточную функцию системы на сумму простейших дробей:
![]() (4. 1)
(4. 1)
Построим граф системы.
Жорданова каноническая форма:
![]() (4. 2)
(4. 2)
Векторно-матричная запись уравнений (4. 2) имеет вид:
![]()
(4. 3)