

20. Кулисный механизм схема ,характеристики, достоинства ,недостатки, передаточное отношение механизма.
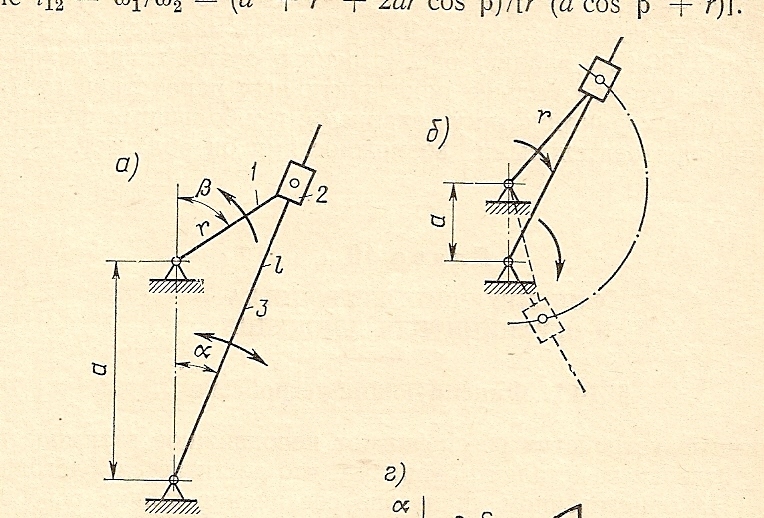
Наиболее часто применяют для преобразования вращательного движения кривошипа 1 в качательное движение кулисы 3. Камень кулисы 2 перемещается вдоль нее по направляющим. Кулисные механизмы могут быть использованы также для преобразования равномерного вращательного движения в неравномерное вращательное движение при а<r. Кулисы с камнем применяют также в тангесных(а), синусных(б) и др механизмах для замены высших кинематических пар низшими. Зависимость угла поворота α кулисы от угла поворота β кривошипа:
tgα=rsinβ/(a+rcosβ) после дифферен этого выражения по времени и преобразований получим выражение для угловой скорости кулисы ω3=ω1r(acosβ+r)/(a^2+r^2+2arcosβ)
где ω3=dα/dt, ω1=dβ/dt=const => передаточное отношение i12=ω1/ω2=(a^2+r^2+2arcosβ)/[r(acosβ+r)] Дифференц по времени выражение для ω3 =>получаем угловое ускорение кулисы ε3=d2α/dt2 => ε3=ω12[ra(r2-a2)sinβ]/(a2+r2+2arcosβ)2
Наиболее характерным является применение кулисных механизмов в устройствах для получения прерывистого движения, например в производственных автоматах, работающих по определенному циклу, в киноаппаратуре. В таких устройствах используют мальтийский крест. Лопасти 2 креста, имеющие пазы, представляют собой кулисы.
Достоинства: простота конструкции, изготовления, регулировки и эксплуатации. надежность в работе, малые габариты.
Недостатки: ограниченность угловых и линейных перемещений, зазоры в шарнирах, передаточное отношение непостоянно.
21. Кривошипно-ползунный механизм схема, характеристики, достоинства ,недостатки, передаточное отношение механизма.
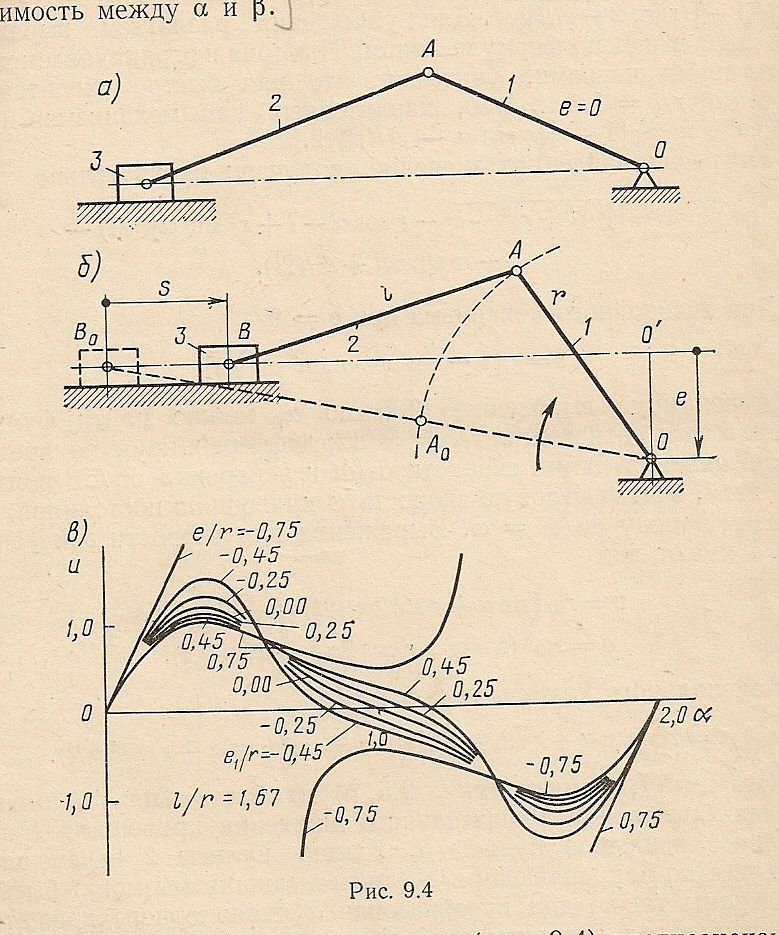
Предназначаются для преобразования вращательного движения кривошипа 1 в возвратно-поступательное движение ползуна 3 посредством шатуна 2 и наоборот. Различают аксиальный и дезаксиальный механизмы. В последнем направление движения ползуна смещено относительно оси вращения кривошипа на величину e , называемую дезаксиалом.
Характеристикой механизма является зависимость перемещения ѕ ползуна от угла α поворота кривошипа.
в общем случае ѕ=f(α,r,l,e)-семейство кривых для различных значений геометрических параметров e,l,r. При e=0 дезаксиальный механизм переходит в аксиальный.
Определим зависимость ѕ=f(α) для общего случая(e не равен 0)
применяем крайнее левое положение B0 ползуна за начальное. s=O' B0-O'B
угол O'BA=β угол O'OA=90-α =>O₁B=ℓcosΨ+rcosα и ѕ=√((ℓ+r)^2 –e^2)-ℓcosΨ-rcosα
ℓsinΨ+e=rsinα => cosΨ=√(1-[(rsinα-e)/ℓ]^2) => s=[√((ℓ+r)^2-e^2) – rcosα-ℓ+r^2*sin^2α]/(2ℓ)-resinα/ℓ+e^2/(2ℓ)
для аксиального механизма при е=0 s=r[1-cosα+rsin^2α/(2ℓ)]
=> дифференц по α можно найти функцию передаточного отношения i12=ds/dα, дифференц по времени-функции скорости ds/dt и ускорения ползуна.dα/dt=ω
V=rω[sinα +rsin2α /(2ℓ)- ecosα/ℓ] a=rω^2 [cosα+rcos2α/ℓ+esinα/ℓ]
для аксиального механизма при е=0 V=rω[sinα+rsin2α/(2ℓ)] a=rω^2 (cosα+rcos^2 α/ℓ)
Достоинства: простота конструкции, изготовления, регулировки и эксплуатации. надежность в работе, малые габариты.
Недостатки: ограниченность угловых и линейных перемещений, зазоры в шарнирах, передаточное отношение непостоянно.