

Контрольные вопросы
Охарактеризовать понятия:
типовые входные воздействия;
передаточная функция, весовая функция;
АЧХ, ФЧХ, АФЧХ, логарифмические характеристики;
характеристическое уравнение САР;
структурные преобразования САР, примеры;
критерии качества САР.
Получить характеристики звена (3.1) при
 :
:АЧХ при
 ;
;ФЧХ при ;
АФЧХ при ;
АЧХ;
ФЧХ;
АФХ.
Как определить установившееся значение выходной величины
 и статическую ошибку
?
и статическую ошибку
?
Как оценить запас устойчивости замкнутой САР, используя корни передаточной функции?
Как оценить показатели колебательности замкнутой САР, используя АЧХ?
3.2. Исследование процессов регулирования в системе с одноемкостным объектом и п-регулятором
Цель работы
Изучение процессов регулирования в системе с одноемкостным объектом и типовым П-регулятором.
Исследование влияния запаздывания на процесс регулирования.
Задание на работу
Получить графики процессов регулирования при ступенчатом воздействии и различных значениях коэффициента передачи регулятора.
Исследовать влияние запаздывания на процесс регулирования в системе с П-регулятором.
Сделать выводы о влиянии величины коэффициента передачи П-регулятора на устойчивость и качество процессов регулирования.
Содержание отчета
Тема, цель и задание на работу (в соответствии с предложенным вариантом).
Расчетный материал.
Структурная динамическая схема САР, таблицы и графики результатов экспериментов.
Выводы по работе.
Исходные данные для моделирования
Передаточная функция объекта регулирования имеет вид
![]() , (3.2)
, (3.2)
где
![]() – коэффициент передачи и постоянная
времени объекта;
– коэффициент передачи и постоянная
времени объекта;
![]() – время запаздывания.
– время запаздывания.
Параметры объекта для различных групп представлены в табл. 3.2, где j – номер рабочего места.
Таблица 3.2
Параметр |
Группа 1-1 |
Группа 1-2 |
Группа 2-1 |
Группа 2-2 |
|
0,5+0,2j |
1,5+0,1j |
2,5+0,1j |
3,5+0,1j |
|
2+0,1j |
3+0,1j |
4+0,1j |
5+0,1j |
|
0,05+0,01j |
0,12+0,01j |
0,05+0,01j |
0,12+0,01j |
Передаточная функция регулятора имеет вид
, (3.3)
где – коэффициент передачи регулятора.
Последовательность выполнения работы
Сформировать модель САР, представленную на рис. 3.3, используя систему SIMULINK, задать требуемые параметры блоков модели (см. подразд. 2.2).
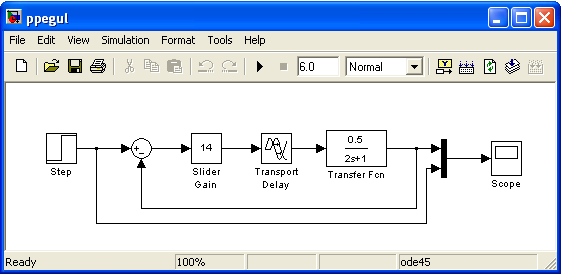
Рис. 3.3. Модель системы автоматического регулирования с П-регулятором
Получить графики процессов регулирования для объекта (3.2) при единичном ступенчатом воздействии и четырех значениях коэффициента передачи регулятора на интервале от =1 до =
 ,
где
–
значение коэффициента, при котором
система теряет устойчивость.
,
где
–
значение коэффициента, при котором
система теряет устойчивость.
Для каждого случая оценить статическую
погрешность
и определить время регулирования tP
при допустимом отклонении =5%.
Построить графики зависимостей tP
=f(![]() )
и
= f(
).
)
и
= f(
).
Получить график процесса регулирования для объекта (3.2) при единичном ступенчатом воздействии и значении коэффициента передачи регулятора, равном
![]() , (3.4)
, (3.4)
обеспечивающем примерно 20% -ное перерегулирование (см. табл. 1.2).
Для полученного графика процесса
регулирования определить: установившееся
значение выходной величины
![]() ,
степень затухания
,
степень затухания
![]() ,
перерегулирование ,
статическую ошибку
,
время регулирования tP
при допустимом отклонении =5%.
,
перерегулирование ,
статическую ошибку
,
время регулирования tP
при допустимом отклонении =5%.
4. Исследовать влияние запаздывания на процесс регулирования. Для этого необходимо изменить на 10 % и оценить изменение , , , и tP .
5. Получить график процесса регулирования
для объекта (3.2) при единичном ступенчатом
воздействии и таком значении коэффициента
передачи регулятора
,
при котором в системе возникают
незатухающие колебания. Записать
значение
и определить величину периода колебаний
![]() .
.