

1.4. Определение оптимальных настроек регуляторов
Переходный процесс в САР зависит от свойств объекта регулирования, характера и величины возмущающих воздействий, типа регулятора и конкретных значений его параметров, которые называются настройками. При определении настроек решают две задачи. Во-первых, настройки должны соответствовать устойчивой системе, во-вторых, они должны быть оптимальными.
Оптимальными настройками регулятора называются такие, которые соответствуют минимуму какого-либо показателя качества. Выбор показателя качества осуществляют, исходя из технологических требований.
Для определения оптимальных настроек регуляторов разработано множество различных методов. Рассмотрим некоторые из них.
Метод сканирования заключается в разбиении области допустимых настроек выбранного регулятора с равным шагом и определении показателей качества для каждого набора настроек в узлах получившейся сетки. После просмотра всех узлов выбираются наборы настроек, соответствующие наилучшим показателям качества. Настройки могут быть уточнены далее также путем сканирования окрестности выбранного узла с более мелким шагом.
Приближенные методы основываются на результатах математического моделирования САР и используются для быстрой оценки значений настроек регуляторов.
Пусть объект управления представляет собой апериодическое звено с запаздыванием
![]() ,
(1.15)
,
(1.15)
где K – коэффициент усиления, Т – постоянная времени, – запаздывание.
Тогда настройки регуляторов могут быть определены по соотношениям, представленным в табл. 1.2.
В табл.1.2 также представлены формулы
ВТИ, обеспечивающие степень затухания
примерно = 0,75
и значение интегрального квадратичного
критерия, близкого к минимуму при
![]() .
.
Таблица 1.2
Регулятор |
Процесс с 20 % - м перерегулированием |
Формулы ВТИ |
П |
|
|
И |
|
|
ПИ |
|
|
ПИД |
|
|
Метод замкнутого контура. Метод может быть использован для большинства процессов регулирования. В методе учитываются требования к устойчивости контура регулирования и обеспечивается примерно 4-кратное затухание амплитуды колебаний за один период.
В этом методе настройки пропорционального, интегрального и дифференциального звеньев регулятора вначале фиксируются. Затем коэффициент усиления пропорционального звена увеличивают до тех пор, пока выходной сигнал не начнет устойчиво колебаться, как показано на рис. 1.2.

Рис. 1.2. Незатухающие колебания в САР
Значение
,
при котором начинаются устойчивые
колебания, обозначим
![]() .
В этом случае система находится на
границе устойчивости, а значение
коэффициента называется критическим.
Обозначим длительность периода устойчивых
колебаний
.
В этом случае система находится на
границе устойчивости, а значение
коэффициента называется критическим.
Обозначим длительность периода устойчивых
колебаний
![]() ,
тогда рекомендуемые настройки
регулятора определяются в зависимости
от закона регулирования из следующих
формул:
,
тогда рекомендуемые настройки
регулятора определяются в зависимости
от закона регулирования из следующих
формул:
П-регулятор
![]() ;
(1.16)
;
(1.16)
ПИ-регулятор
![]() ,
,
![]() ;
(1.17)
;
(1.17)
ПИД-регулятор
![]() ,
,
![]() ,
,
![]() .
(1.18)
.
(1.18)
Близкие настройки рекомендует метод
Циглера и Никольса, в котором, аналогично
вышеописанному, исследуется П-регулятор
(ПИ-регулятор превращается в П-регулятор
за счет установки бесконечно большого
значения
![]() ).
).
Рекомендуемые настройки регулятора определяются следующими соотношениями:
П-регулятор
![]() ;
(1.19)
;
(1.19)
ПИ-регулятор
![]() ,
,
![]() ;
(1.20)
;
(1.20)
Метод заданного затухания используется
в тех случаях, когда выход на режим
автоколебаний недопустим и для медленно
протекающих процессов. В методе исходные
настройки выбираются в области
устойчивости системы. При этом находят
значение
![]() ,
при котором ступенчатое возмущение
вызывает такие затухающие колебания в
системе, что их амплитуда затухает в 4
раза за каждый полупериод, как показано
на рис.1.3, т.е. отклонение первого максимума
от установившегося значения в 4 раза
больше, чем значение выходной переменной
через половину периода.
,
при котором ступенчатое возмущение
вызывает такие затухающие колебания в
системе, что их амплитуда затухает в 4
раза за каждый полупериод, как показано
на рис.1.3, т.е. отклонение первого максимума
от установившегося значения в 4 раза
больше, чем значение выходной переменной
через половину периода.
Тогда рекомендуемые настройки регулятора определяются в зависимости от закона регулирования из следующих формул:
П-регулятор
![]() .
(1.21)
.
(1.21)
ПИ-регулятор
![]() ,
,
![]() .
(1.22)
.
(1.22)
ПИД-регулятор
![]() ,
,
,
,
![]() . (1.23)
. (1.23)
Получение показанного на рис. 1.3 переходного процесса с 4-кратным затуханием за полупериод требует меньше времени, чем в методе замкнутого контура, так как при этом необходимо просмотреть всего два неполных цикла колебаний.
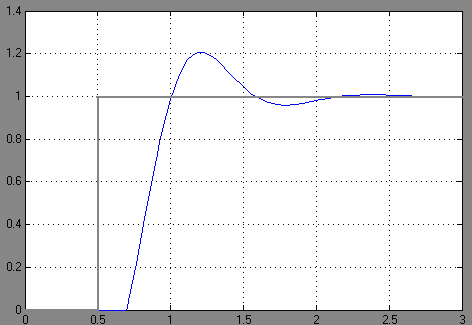
Рис. 1.3. Переходный процесс в САР