

Частота затухающих колебаний
![]() .
(3.22)
.
(3.22)
Период затухающих колебаний Т* представляет собой промежуток времени между двумя последовательными прохождениями точки в одном направлении через положение покоя (рис. 3.6):
![]() .
(3.23)
.
(3.23)
Формулу (24) можно представить в следующем виде:
![]() ,
(3.24)
,
(3.24)
где Т = 2π/k — период свободных колебаний этой же точки.
Формула (3.24) показывает, что период затухающих колебаний больше периода свободных колебаний точки. Однако при небольшом сопротивлении это увеличение незначительно. В случае небольшого сопротивления период затухающих колебаний можно принимать равным периоду свободных колебаний.
Амплитудой затухающих колебаний называют наибольшие отклонения точки в ту и другую сторону от положения покоя в течение каждого колебания.
Из
последовательных значений переменной
амплитуды можно составить ряд (рис.
3.7):
![]() .
.
Определим
отношение последовательных членов ряда
Ai+1
и Ai,
соответствующих
моментам
времени
![]() :
:
![]() .
(3.25)
.
(3.25)
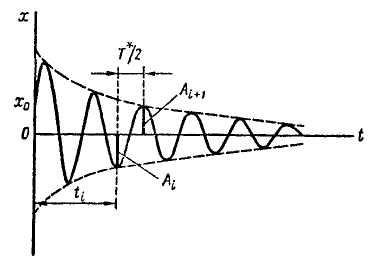
Рис. 3.7
Так
как отношение Аi+1
/Аi
постоянно
и по величине меньше единицы, то
последовательные значения амплитуды
составляют убывающую геометрическую
прогрессию со знаменателем
![]() .
.
Отвлеченное
число
называется декрементом
колебаний: натуральный логарифм
декремента, т. е. величина
![]() ,
называется логарифмическим
декрементом:
,
называется логарифмическим
декрементом:
![]() .
(3.26)
.
(3.26)
Коэффициент n называют коэффициентом затухания. Затухание колебаний происходит очень быстро даже при малом сопротивлении. Так, например, при n=0,05k
![]() ,
,
т.е. период затухающих колебаний Т* отличается от периода свободных колебаний Т лишь на 0,125%, а амплитуда колебаний за время одного полного колебания уменьшается на 0,27 своей величины, а после 10 полных колебаний становится равной лишь 0,04304 своего первоначального значения.
Tаким образом, основное влияние сопротивления на свободные колебания материальной точки выражается в уменьшении амплитуды колебаний с течением времени, т. е. в затухании колебаний.
Случаи
апериодического движения.
Движение материальной точки теряет
колебательный характер и становится
апериодическим в случае большого
сопротивления, т. е.
при
n≥
k
или α
≥ 2![]() .
.
а) При n > k корни общее решение уравнения (3.15) имеет вид
![]() .
(3.27)
.
(3.27)
Введем вместо постоянных интегрирования C1 и С2 две новые постоянные В1 и В2, положив
![]() .
.
Подставим эти значения C1 и С2 в уравнение (3.27):
![]() .
.
Введем в полученное уравнение гиперболические функции
Тогда получаем уравнение в следующем виде:
![]() .
.
Дальнейшее преобразование этого уравнения проведем, заменив постоянные B1 и В2 двумя другими постоянными A и β по условию
![]() .
.
Тогда уравнение примет вид
![]() .
(3.28)
.
(3.28)
Уравнение
движения точки (3.28) показывает, что
рассматриваемое движение точки не
является колебательным, так как
гиперболический синус не является
периодической функцией. В зависимости
от начальных условий материальная точка
может совершать одно из движений, графики
которых показаны на рис. 3.8—3.10. Эти
графики соответствуют начальному
отклонению точки от положения покоя на
величину
![]() .
.
На рис. 3.8 показан график движения точки с начальной скоростью v0, имеющей направление, совпадающее с направлением оси x. Благодаря этой скорости точка сначала удаляется от положения покоя, а затем под действием восстанавливающей силы постепенно приближается к этому положению.
Графики (рис. 3.9 и 3.10) соответствуют движению точки с начальной скоростью , направленной противоположно направлению оси х. При достаточно большой начальной скорости точка может совершить один переход через положение покоя и затем при обратном движении приближаться к этому положению (рис. 3.9).

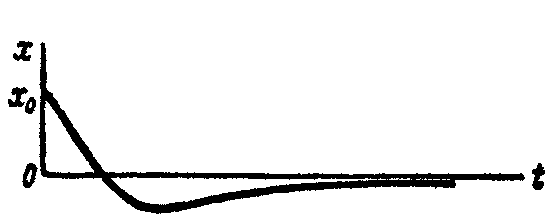
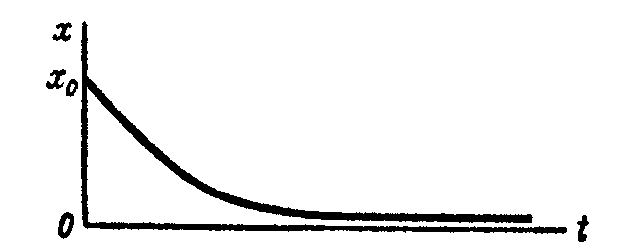
Рис. 3.8 Рис. 3.9 Рис. 3.10
б) При n=k общее решение уравнения (3.15) в этом случае имеет вид
![]() .
(3.29)
.
(3.29)
Чтобы найти C1 и С2, получим уравнение, определяющее скорость точки, продифференцировав уравнение (3.29):
![]() .
(3.30)
.
(3.30)
Пусть в начальный момент t= 0 точка имеет координаты x0 и проекцию скорости на ось х, равную .
Подставим в уравнения (3.29) и (3.30) эти начальные условия:
![]() ,
,
откуда
![]() .
.
Зная значения С1 и С2, представим уравнение (3.29) в следующем виде:
![]() .
(3.31)
.
(3.31)
Движение точки, определяемое уравнением (3.31), является также апериодическим.
Пример. Тело весом G = 20 Н, лежащее на гладкой горизонтальной плоскости и прикрепленное к концу недеформированной пружины (рис. 3.11), отклоняют из положения покоя вправо, растягивая пружину на 4 см, и отпускают, сообщая начальную скорость 56 см/с, направленную влево (удлинение пружины на 1 см вызывается силой 4 Н). Определить дальнейшее движение тела, пренебрегая массой пружины.
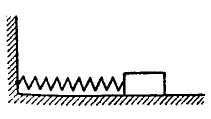
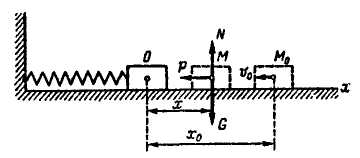
Рис. 11 Рис. 12
Решение. Направим ось х горизонтально вправо, считая началом координат О положение покоя тела, принятого за материальную точку. Тогда начальные условия будут следующими (рис. 3.12):
![]() .
.
В
произвольный момент времени t
на тело М,
имеющее координату х,
действуют сила тяжести
,
реакция плоскости
![]() и сила упругости деформированной пружины
,
направленная к точке О.
Модуль силы
пропорционален деформации пружины, т.
е.
и сила упругости деформированной пружины
,
направленная к точке О.
Модуль силы
пропорционален деформации пружины, т.
е.
,
где с - коэффициент жесткости пружины.
Проекция силы на ось х
.
По условию задачи, с = 4 Н/см.
Дифференциальное уравнение свободных колебаний:
![]() .
.
Решение дифференциального уравнения представим в форме:
.
Вычислим частоту и период колебаний по формулам:
![]() ;
;
![]() .
.
Амплитуду А и начальную фазу β свободных колебаний тела вычислим по начальным условиям с помощью формул:
 ;
;
![]() .
.
Уравнение свободных колебаний груза имеет вид
![]() .
.
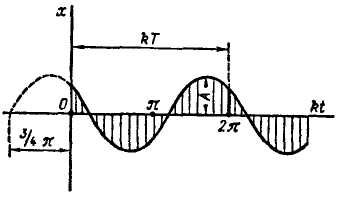
Рис. 3.13
На рис. 3.13 построен график движения, соответствующего полученному уравнению. При этом по оси абсцисс отложены не значения t, а пропорциональные им произведения kt. Тогда начальная фаза β изображается величиной смещения начала волны синусоиды в направлении, противоположном направлению оси абсцисс.
Примечание.
Амплитуда свободных колебаний зависит
как от начального отклонения тела из
положения покоя, так и от начальной
скорости. При этом направление начальной
скорости не влияет на амплитуду. Так,
если начальную скорость направить
вправо (![]() =56
см/с),
амплитуда будет иметь ту же величину.
Если тело опустить без начальной скорости
(
=
0), то амплитуда
=56
см/с),
амплитуда будет иметь ту же величину.
Если тело опустить без начальной скорости
(
=
0), то амплитуда
![]() ,
,
т. е. амплитуда будет равна начальному отклонению тела от положения покоя. Наличие начальной скорости увеличивает амплитуду,
Лекция 4
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ ТОЧКИ
Вынужденные колебания точки.
возмущающая сила
Вынужденные колебания совершает материальная точка, на которую наряду с восстанавливающей силой действует периодически изменяющаяся сила, называемая возмущающей силой.
Практически
наиболее важным является случай, когда
возмущающая силa
![]() изменяется по гармоническому закону,
т. е. проекция ее на ось х,
направленную по траектории точки,
определяется так:
изменяется по гармоническому закону,
т. е. проекция ее на ось х,
направленную по траектории точки,
определяется так:
![]() .
(4.1)
.
(4.1)
где Н – максимальный модуль, или амплитуда, возмущающей силы; р - частота изменения возмущающей силы, равная числу полных циклов изменения возмущающей силы за 2π с; pt+δ - фаза изменения возмущающей силы: δ- начальная фаза изменения возмущающей силы.
Период
изменения возмущающей силы
![]() определяется по ее частоте:
определяется по ее частоте:
![]() .
(4.2)
.
(4.2)
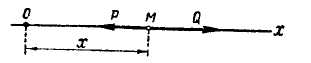
Рис. 4.1
Рассмотрим
прямолинейное движение материальной
точки М (рис.
4.1) под действием восстанавливающей
силы
и возмущающей силы
![]() ,
изменяющейся по гармоническому закону.
,
изменяющейся по гармоническому закону.
Направим ось х по прямолинейной траектории точки М, а начало координат поместим в положение покоя точки М, соответствующее недеформированной пружине.
Составим дифференциальное уравнение движения точки, учитывая, что на точку М с координатой х в момент времени t действуют силы и , имеющие проекции на ось х:
![]() и
.
и
.
Тогда
![]() ,
,
или
![]() .
.
Здесь
![]() - квадрат
частоты свободных колебаний. Введем
обозначение Н/т
= h:
- квадрат
частоты свободных колебаний. Введем
обозначение Н/т
= h:
![]() .
(4.3)
.
(4.3)
Уравнение (4.3) представляет собой дифференциальное уравнение вынужденных колебаний материальной точки.
Общее
решение уравнения (4.3) складывается из
общего решения однородною уравнения
![]() и частного
решения данного уравнения (4.3):
и частного
решения данного уравнения (4.3):
![]() .
.
Однородное уравнение имеет общее решение:
![]() .
.
В соответствии с видом функции f(t) в правой части уравнения (4.3) будем искать частное решение уравнения (4.3) в виде
![]() .
(4.4)
.
(4.4)
Определим
постоянную АB
подстановкой функции (4.4) в уравнение
(4.3). Так как
![]() ,
то после подстановки (4.4) в уравнение
(4.3)
,
то после подстановки (4.4) в уравнение
(4.3)
![]() .
.
Полученное равенство должно быть справедливо при любом значении sin (pt +δ). Это выполняется лишь при равенстве коэффициентов в левой и правой частях, т. е.
![]() ,
,
откуда
![]() .
(4.5)
.
(4.5)
Подставляя значение АВ в выражение (4.4), находим искомое частное решение уравнения (4.3):
![]() .
(4.6)
.
(4.6)