

Затухающие свободные колебания, случаи апериодического движения
Материальная точка, совершающая колебания в реальных условиях, испытывает сопротивление движению (трение, сопротивление воздуха и т. п.). Эго означает, что кроме восстанавливающей силы, направленной к центру колебаний, на точку действует сила сопротивления, направленная всегда в сторону, противоположную направлению движения точки. Закон изменения модуля силы сопротивления зависит от физической природы этой силы. Так, например, модуль силы трения скольжения можно принять постоянным.
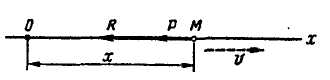
Рис. 3.5
Сопротивление воздуха при малых скоростях движения тел считают пропорциональным первой степени скорости, а при больших скоростях, в довольно широких пределах, его принимают пропорциональным квадрату скорости движущегося тела.
Рассмотрим
колебания материальной точки М
под действием линейной восстанавливающей
силы
и силы сопротивления движению
![]() (рис. 3.5), пропорциональной скорости
точки.
(рис. 3.5), пропорциональной скорости
точки.
Направим ось х по траектории точки и совместим начало координат О с положением покоя точки. Модуль восстанавливающей силы
.
Проекция силы на ось х
.
Модуль
силы сопротивления среды
![]() пропорционален модулю скорости точки:
пропорционален модулю скорости точки:
![]() .
.
Если v=1, то R=α, т.е. коэффициент пропорциональности α численно равен силе сопротивления при скорости движения точки, равной единице. Сила сопротивления направлена всегда противоположно скорости точки v:
![]() .
.
Проекции
силы
и скорости
![]() на ось х
имеют противоположные знаки:
на ось х
имеют противоположные знаки:
![]() .
(3.14)
.
(3.14)
Составим дифференциальное уравнение движения материальной точки под действием сил и :
![]()
или
![]() .
.
Введем
обозначения
![]() и
и
![]() ,
тогда
,
тогда
![]() .
(3.15)
.
(3.15)
Уравнение (3/15) является дифференциальным уравнением движения материальной точки под действием восстанавливающей силы и силы сопротивления, пропорциональной скорости точки.
Величина
![]() является частотой
свободных
колебаний
данной точки. Коэффициент и
является частотой
свободных
колебаний
данной точки. Коэффициент и
![]() характеризует сопротивление
среды.
характеризует сопротивление
среды.
Рассмотрим
случай колебаний материальной точки,
который возникает при n<k.
Так как
![]() и k
=
и k
=![]() ,
то в рассматриваемом случае
,
то в рассматриваемом случае
![]() <
или α < 2
.
<
или α < 2
.
В этом случае общее решение уравнения (3.15) имеет вид
![]() .
.
Вместо постоянных интегрирования С1 и C2 введем две новые постоянные А и β, положив
![]() .
.
Подставив эти значения C1 и С2, получим решение дифференциального уравнения (15), т. е. уравнение движения точки в виде
![]() .
(3.16)
.
(3.16)
Движение,
определяемое уравнением (3.16), имеет
колебательный характер, так как координата
х
периодически изменяет свой знак при
изменении знака, входящего в уравнение
синуса. Множитель
![]() указывает на то, что амплитуда колебаний
с течением времени уменьшается. Колебания
этого вида называются затухающими.
График затухающих колебаний изображен
на рис. 3.6.
указывает на то, что амплитуда колебаний
с течением времени уменьшается. Колебания
этого вида называются затухающими.
График затухающих колебаний изображен
на рис. 3.6.

Рис. 3.6
Так
как,
![]() ,
то абсолютная величина координаты х
удовлетворяет условию
,
то абсолютная величина координаты х
удовлетворяет условию
![]() .
.
Следовательно, график затухающих колебаний заключен между двумя симметричными относительно оси абсцисс кривыми, имеющими уравнения
![]() и
и
![]() .
.
Величины
А
и
![]() как постоянные интегрирования определяются
по
начальным
условиям задачи. Чтобы
найти А
и β,
получим уравнение, определяющее скорость
точки, продифференцировав уравнение
(3.16):
как постоянные интегрирования определяются
по
начальным
условиям задачи. Чтобы
найти А
и β,
получим уравнение, определяющее скорость
точки, продифференцировав уравнение
(3.16):
![]() .
(3.17)
.
(3.17)
Пусть
в начальный момент t=
0 точка имеет координату
![]() и
проекцию скорости на ось х,
равную
.
и
проекцию скорости на ось х,
равную
.
Подставим в уравнения (3.16) и (3.17) эти начальные условия:
![]()
Отсюда
 ,
(3.18)
,
(3.18)
![]() ,
(3.19)
,
(3.19)
![]() ,
(3.20)
,
(3.20)
![]() .
(3.21)
.
(3.21)