

Циклические координаты. Циклические интегралы. Обобщенные координаты, которые не входят явно в выражение кинетического потенциала l, называются циклическими координатами.
Предположим,
что среди s
обобщенных координат системы координаты
![]() являются циклическими. Тогда по
определению циклических координат
производные от кинетического потенциала
по этим координатам равны нулю:
являются циклическими. Тогда по
определению циклических координат
производные от кинетического потенциала
по этим координатам равны нулю:
![]() .
(14.11)
.
(14.11)
В этом случае k уравнений (14.10) принимают вид
![]() ,
(14.12)
,
(14.12)
откуда
![]() .
(14.13)
.
(14.13)
Равенства (14.13) называются циклическими интегралами. Рассмотрим некоторые примеры циклических координат. Положение точки в пространстве определяется тремя координатами. Примем декартовы координаты свободной материальной точки х, у, z за обобщенные координаты. Тогда кинетическая и потенциальная энергии точки, движущейся в поле силы тяжести, определятся следующими выражениями:
![]() .
.
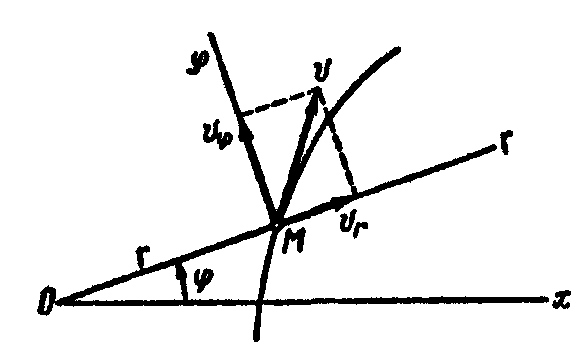
Рис. 14.1
Кинетический потенциал точки
![]() .
.
Координаты х и у не входят в выражение кинетического потенциала L, т. е. являются циклическими координатами. Циклические интегралы имеют вид
![]() или
или
![]() ;
;
![]() или
или
![]() .
.
Эти
выражения
показывают,
что проекции
скорости точки на горизонтальные оси
координат постоянны, т. е. движение
проекции точки на горизонтальную
плоскость происходит равномерно и
прямолинейно, или при
![]() и
и
![]() проекция точки на горизонтальную
плоскость неподвижна, т. е. точка движется
по вертикали. Под действием силы
тяжести изменяется только вертикальная
составляющая скорости точки. В качестве
второго примера рассмотрим движение
материальной точки массой т
под действием
центральной силы. Центральная сила
направлена к некоторому центру, а ее
модуль является функцией расстояния
от точки до центра.
проекция точки на горизонтальную
плоскость неподвижна, т. е. точка движется
по вертикали. Под действием силы
тяжести изменяется только вертикальная
составляющая скорости точки. В качестве
второго примера рассмотрим движение
материальной точки массой т
под действием
центральной силы. Центральная сила
направлена к некоторому центру, а ее
модуль является функцией расстояния
от точки до центра.
Воспользуемся полярными координатами, принимая их за обобщенные координаты (рис. 14.1). Определим кинетическую энергию точки, выражая модуль скорости точки v через ее проекции на оси полярных координат vr и vφ:
![]() .
.
Ранее показано, что потенциальная энергия материальной точки, находящейся в поле ньютоновой силы притяжения, является функцией расстояния от точки до центра притяжения. Это положение справедливо и при другом законе изменения центральной силы:
П=f(r).
Кинетический потенциал точки
![]() .
.
Так как угловая координата φ не входит явно в выражение кинетического потенциала L, то она является циклической. Соответствующий ей циклический интеграл имеет вид
![]() или
или
![]() .
.
Это равенство выражает закон сохранения момента количества движения материальной точки относительно центра.
3. Вариационный принцип Гамильтона-Остроградского Общие понятия
Вариационными принципами классической механики называют общие закономерности механического движения, позволяющие из совокупности кинематически возможных движений механической системы, т. е. движений, допускаемых наложенными на систему связями, выделить действительное движение, которое она будет совершать в заданном силовом поле.
Вариационные принципы разделяются на дифференциальные и интегральные. Дифференциальные вариационные принципы дают критерий истинного движения, отнесенный к некоторому моменту времени, а интегральные — к конечному интервалу времени.
Важнейшим и наиболее общим дифференциальным вариационным принципом классической механики является принцип возможных перемещений.
Важнейшими интегральными принципами классической механики являются принцип Гамильтона — Остроградского и принцип стационарного действия Мопертюи — Лагранжа.
Положение
голономной механической системы с s
степенями свободы относительно
системы отсчета определяется обобщенными
координатами (![]() ),
которые при движении механической
системы изменяются, являясь функциями
времени t.
),
которые при движении механической
системы изменяются, являясь функциями
времени t.
Совокупность обобщенных координат механической системы ( ) для каждого момента времени можно рассматривать как координаты точки в пространстве s измерений. Тогда каждой конфигурации механической системы, т. е. ее положению в пространстве, будет соответствовать определенная точка в s-мерном пространстве. Условимся называть s-мерное пространство пространством конфигураций.
С течением времени положение системы в пространстве изменяется и точка, изображающая эту систему, описывает в пространстве конфигураций некоторую кривую. Условимся называть эту кривую траекторией движения системы. Движение изображающей точки вдоль этой траектории отображает действительное движение системы в пространстве.
Очевидно, что каждой точке такой траектории в пространстве конфигураций соответствует определенное положение механической системы в реальном евклидовом пространстве.
Отбор действительного движения механической системы из совокупности ее возможных движений можно осуществить с помощью анализа ее движения в пространстве конфигураций на основе интегральных вариационных принципов.
Рассмотрим вариационный принцип Гамильтона – Остроградского.