

Задача 5. Исследование механической системы с применением уравнений Лагранжа второго рода
По условию задачи № 3 определить ускорение тела 1, используя уравнение Лагранжа П рода.
Решение.
1.
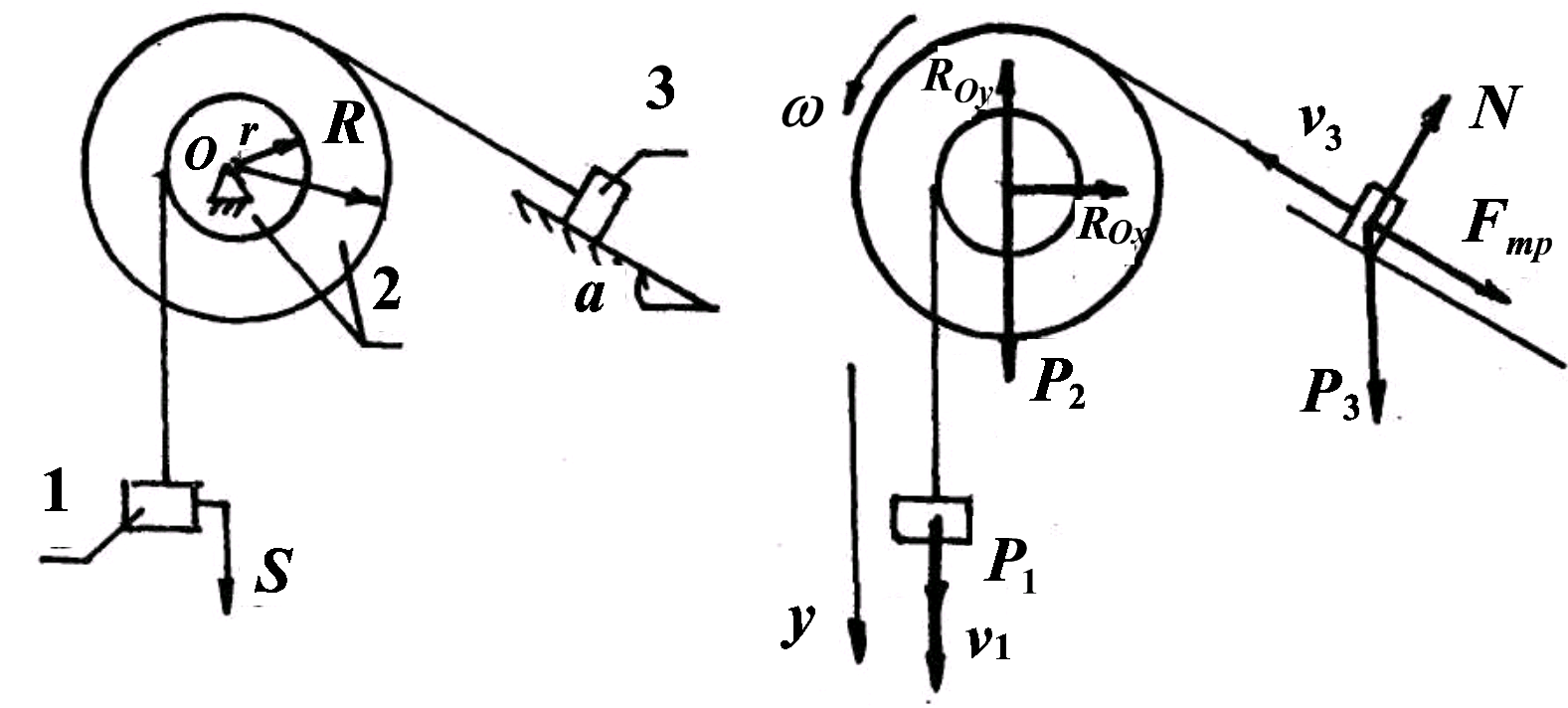
Составление расчетной схемы.. На
механическую систему действуют
активные
силы
![]() ,
,
,
,
![]() .
.
Применяя
принцип освобождаемости от связей
только к внешним связям, покажем на
расчетной схеме реакции шарнирно-неподвижной
опоры
![]() и
и
![]() реакции шероховатой поверхности
и
.
Силу трения направим в сторону,
противоположную движению тела 3.
реакции шероховатой поверхности
и
.
Силу трения направим в сторону,
противоположную движению тела 3.
Изобразим скорости тел системы исходя из того, что тело 1 опускается.
2. Выбор теоремы.
Задачу решаем, используя дифференциальное уравнение механической системы в обобщенных координатах
![]() .
.
Так как система имеет одну степень свободы, а определяем ускорение тела 1, то за обобщенную координату примем координату первого тела у
q=y.
Обобщенная
скорость, в таком случае,
![]() .
.
3. Составление уравнения.
а) Определение кинетической энергии системы.
Кинетическая энергия системы представляет собой сумму кинетических энергий тел 1,2 и 3.
![]() .
.
Вычислим Q для неконсервативных сил
 ,
,
то есть
![]() .
.
Работа сил и на заданном приращении обобщенной координаты равна нулю, так как силы приложены к неподвижной точке. Работа нормальной реакции поверхности N также равна нулю, сила перпендикулярна направлению движения.
Подставим в обобщенную силу значения
![]() .
.
![]() или
или
![]() .
.
в) Определение потенциальной энергии системы.
Потенциальная энергия численно равна работе потенциальных сил, действующих на систему, которую необходимо совершить, чтобы вернуть систему из отклоненного положения в положение равновесия.
![]() .
.
Высота, на которую переместится точка приложения силы , равна
![]() .
.
В обобщенных координатах
![]() .
.
Подставляя числовые параметры, запишем
![]() .
.
Подставляем значения Т, П и Q в уравнение Лагранжа П рода и преобразовываем
![]() ,
,
![]() ,
,
![]() ,
,
так как Т не содержит у.
![]() .
.
Таким образом, запишем
![]() ,
,
![]()
Значение ускорения тела получили со знаком «+». Это означает, что груз опускается ускоренно.
2. Кинетический потенциал. Циклические координаты
Предположим,
что на рассматриваемую механическую
систему наряду с силами, имеющими
потенциал (консервативными силами),
девствуют силы, не имеющие потенциала
(неконсервативные силы). При этом условии
обобщенную силу Qj
удобно
представить в виде суммы обобщенной
силы
![]() ,
соответствующей консервативным силам
и обобщенной
силы
,
соответствующей консервативным силам
и обобщенной
силы
![]() ,
соответствующей неконсервативным силам
,
соответствующей неконсервативным силам
![]() :
:
![]() .
.
Если на рассматриваемую систему действуют только консервативные силы, то обобщенная сила определяется формулой:
![]() .
.
В этом случае уравнения Лагранжа второго рода принимают следующий вид:
![]() .
(14.8)
.
(14.8)
Уравнения (14.8) можно преобразовать путем введения функции Лагранжа L=T- П, называемой кинетическим потенциалом.
Так как
.
![]() .
.
Следовательно, кинетический потенциал является функцией обобщенных координат, обобщенных скоростей и времени:
![]() .
(14.9)
.
(14.9)
Потенциальная энергия является функцией только обобщенных координат и времени, а потому
![]() .
.
Пользуясь этим условием, получим
![]() .
.
Подставим эти частные производные в уравнения Лагранжа (14.8):
![]() ,
,
или
![]() .
(14.10)
.
(14.10)
Уравнения (14.10) называются уравнениями Лагранжа второго рода для консервативной системы.
Уравнения Лагранжа широко используют при изучении свободных колебаний механических систем во многих областях техники. Применение уравнений Лагранжа второго рода к определению чистоты и периода свободных колебаний механической системы с одной степенью свободы показано в примерах. Применение уравнений Лагранжа к изучению свободных и вынужденных колебаний механических систем с конечным числом степеней свободы можно найти в ряде специальных курсов.