

2 Обобщенные силы и примеры их вычисления
Рассмотрим механическую систему из n материальных точек М1, М2,…,Мn, находящуюся под действием системы сил . Предположим, что система имеет s степеней свободы, т.е. ее положение определяется s обобщенными координатами q1, q2,…, qs. При наличии нестационарных связей радиус-вектор каждой точки системы относительно начала неподвижной системы декартовых координат (рис. 13.2) и ее декартовы координаты xi,, yi, zi являются функциями обобщенных координат и времени:
![]() .
.
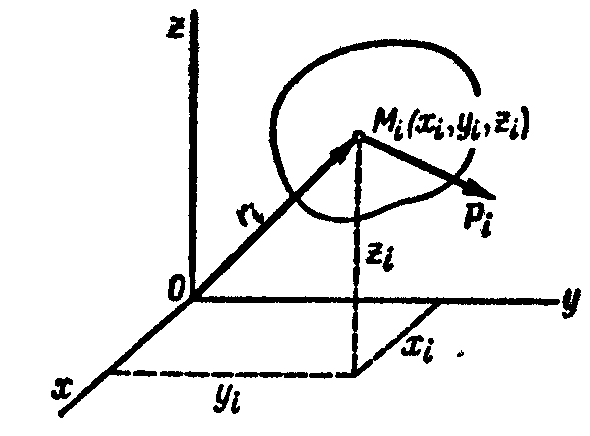
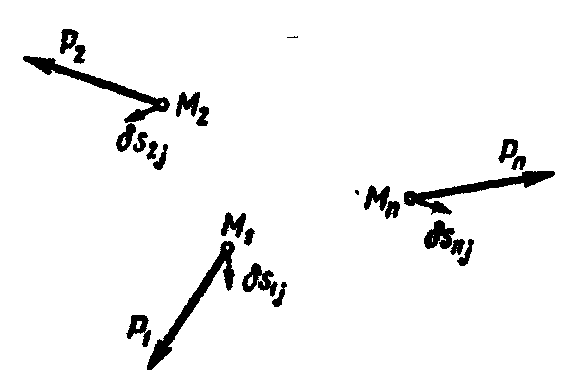
Рис. 13. 2 Рис. 13.3
При
стационарных связях эти равенства не
будут содержать явно времени t.
Сообщим элементарное приращение только
одной координате qj,
оставляя неизменными все остальные
обобщенные координаты. Тогда радиус-вектор
каждой точки Мi
получит
приращение
![]() ,
обусловленное приращением δqj
этой координаты:
,
обусловленное приращением δqj
этой координаты:
![]() .
(13.7)
.
(13.7)
Вычислим работу всех сил, действующих на механическую систему на перемещениях точек , вызванных приращением координаты δqj, для чего воспользуемся выражением элементарной работы силы в виде скалярного произведения:
![]() .
.
Разделив
![]() на элементарное приращение обобщенней
координаты
на элементарное приращение обобщенней
координаты
![]() ,
получим величину
,
получим величину
![]() ,
называемую обобщенной
силой:
,
называемую обобщенной
силой:
 .
(13.8)
.
(13.8)
Таким образом, обобщенной силой Qj, соответствующей обобщенной координате qj, называют скалярную величину, определяемую отношением элементарной работы действующих сил на перемещение механической системы, вызванном элементарным приращением координаты qj к величине этого приращения.
На основании (13.8) имеем
![]() .
(13.9)
.
(13.9)
Если
элементарные перемещения точек
механической системы, вызванные
элементарным приращением обобщенной
координаты qj,
обозначить
![]() (рис. 13.3),
то формула (13.9), учитывая, что
(рис. 13.3),
то формула (13.9), учитывая, что
![]() ,
примет вид
,
примет вид
![]() .
(13.10)
.
(13.10)
Размерность обобщенной силы зависит от размерности соответствующей ей обобщенной координаты qj . Так, например, если за обобщенную координату qj принять угол φ, выражаемый в радианах, то размерность обобщенной силы Qj совпадает с размерностью момента силы (работы). Cуммарная работа сил, действующих на механическую систему, на элементарных перемещениях системы (13.7)
![]() ,
,
где
![]() .
(13.11)
.
(13.11)
Следовательно,
 .
.
Меняя порядок суммирования и учитывая формулу (13.8), получаем
 .
.
Таким образом, имеем
![]() ,
(13.12)
,
(13.12)
![]() .
(13.13)
.
(13.13)
В формуле (13.13) множители Qj при элементарных приращениях δqj являются обобщенными силами, соответствующими обобщенным координатам Qj .
Соответственно с приведенной ранее классификацией сил, действующих на механическую систему, обобщенные силы разделяются на обобщенные внешние и внутренние силы или на обобщенные задаваемые (активные) силы и обобщенные реакции связей.
В случае стационарных связей обобщенные реакции идеальных связей равны нулю.
Действительно, для нахождения обобщенной реакция, соответствующей координате qj следует вычислить сумму робот реакций связей на перемещения системы, соответствующем приращению δqj этой координаты, а затем определить обобщенную реакцию связи по формуле
 .
.
Как указывалось выше, в случае стационарных связей описанное перемещение системы является одним из возможных перемещений этой системы, а потому сумма работ реакций идеальных связей на этом перемещении равна нулю:
![]() .
.
Отсюда следует, что
![]() .
(13.14)
.
(13.14)
Таким
образом, при определении обобщенных
сил реакции идеальных связей выпадают.
Покажем, что обобщенную силу, соответствующую
обобщенной координате qj
можно также вычислить как отношение
мощности всех сил, приложенных к
механической системе при возможной
обобщенной скорости
![]() ,
к величине этой обобщенной скорости.
Мощность указанной системы сил
определится по формуле
,
к величине этой обобщенной скорости.
Мощность указанной системы сил
определится по формуле
![]() ,
(13.15)
,
(13.15)
где
![]() -
скорость точки Mi
системы, соответствующая возможной
обобщенной скорости
-
скорость точки Mi
системы, соответствующая возможной
обобщенной скорости
![]() .
Подставив
значение
.
Подставив
значение
![]() в (13.15), получим
в (13.15), получим
![]() .
.
Так
как на основании (13.8)
![]() ,
,
имеем
![]() .
.
Поэтому
 .
(13.16)
.
(13.16)
Формула
(13.16) позволяет определять обобщенную
силу, соответствующую обобщенной
координате qj,
как отношение мощности системы сил,
соответствующей возможной обобщенной
скорости
к числовому значению этой обобщенной
скорости при условии, что
![]() ,
а все остальные возможные обобщенные
скорости равны нулю.
,
а все остальные возможные обобщенные
скорости равны нулю.