

3. Применение принципа возможных перемещений к простейшим машинам
Простейшие
машины являются системами с одной
степенью свободы. На машины действуют
движущая сила
,
или вращающий момент
и сила сопротивления
,
или момент сопротивления
![]() .
Предположим, что силы (или моменты) и
реакции имеющихся связей взаимно
уравновешиваются. Для установления
условий равновесия сил
и
машине сообщают возможное перемещение
и составляют уравнение работ. На основании
(12.6) условие равновесия сил
и
получает вид
.
Предположим, что силы (или моменты) и
реакции имеющихся связей взаимно
уравновешиваются. Для установления
условий равновесия сил
и
машине сообщают возможное перемещение
и составляют уравнение работ. На основании
(12.6) условие равновесия сил
и
получает вид
![]() ,
(12.9)
,
(12.9)
где
![]() - возможное приращение радиуса-вектора
точки приложения силы
,
соответствующее ее возможному перемещению;
- возможное приращение радиуса-вектора
точки приложения силы
,
соответствующее ее возможному перемещению;
![]() - возможное приращение радиуса-вектора
точки приложения силы
,
соответствующее ее возможному
перемещению. Предположим, что возможное
перемещение системы
из состояния
покоя происходит в течение ничтожно
малого промежутка времени τ.
Тогда точки приложения сил перемещаются
со скоростями
- возможное приращение радиуса-вектора
точки приложения силы
,
соответствующее ее возможному
перемещению. Предположим, что возможное
перемещение системы
из состояния
покоя происходит в течение ничтожно
малого промежутка времени τ.
Тогда точки приложения сил перемещаются
со скоростями
![]() и
и
![]() ,
(12.10)
,
(12.10)
называемыми возможными скоростями. Разделим уравнение работ (12.9) на величину τ:
![]() .
.
Подставим сюда значение возможных скоростей точек:
![]() ,
,
или
![]() .
.
Обозначим проекции сил и на направление соответствующих скоростей Р' и R', т.е.
![]() ;
;
тогда
![]() .
.
Если
направления Р'
и
![]() совпадают, то направления R'
и
совпадают, то направления R'
и
![]() противоположны. Пользуясь абсолютными
величинами проекций, получим
противоположны. Пользуясь абсолютными
величинами проекций, получим
![]() ,
,
отсюда
![]() .
(12.11)
.
(12.11)
Соотношение (12.11) можно выразить так: то, что выигрываться в силе, теряется в скорости. Это положение, установленное Галилеем, носит название золотого правила механики. Рассмотрим некоторые простейшие машины.
Полиспасты.
Полиспаст состоит из двух систем блоков,
каждая из которых помещена в общей
обойме (рис. 12.12). Одна обойма закреплена
неподвижно, а другая движется. Сила
,
приложенная к концу нити, является
движущей силой, а вес поднимаемого груза
- силой сопротивления. Определим
зависимость между силами
и
с помощью принципа возможных
перемещений. Сообщим системе возможное
перемещение, совпадающее с ее истинным
перемещением при подъеме груза. Если
точка приложения силы
получит перемещение
![]() ,
то каждая из
шести частей нити между блоками уменьшится
на
,
то каждая из
шести частей нити между блоками уменьшится
на
![]() .
Поэтому точка приложения силы
переместится вверх на
.
Поэтому точка приложения силы
переместится вверх на
![]() .
Составим уравнение работ в виде (12.5):
.
Составим уравнение работ в виде (12.5):
![]() ,
,
или
![]() .
.
Поделив уравнение на , найдем
![]() ,
,
т.е. движущая сила меньше веса поднимаемого груза во столько раз, сколько блоков имеет полиспаст.
Клиновый пресс. Установим зависимость между движущей силой , приложенной к клину, и силой сопротивления сжимаемого тела с помощью принципа возможных перемещений. Для этого сообщим системе возможное перемещение, указанное пунктиром на рис. 12.12, и составим уравнение работ в виде (12.5):
![]() .
.
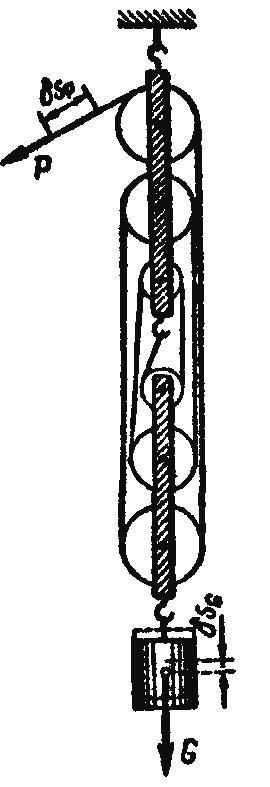
Рис. 12.12
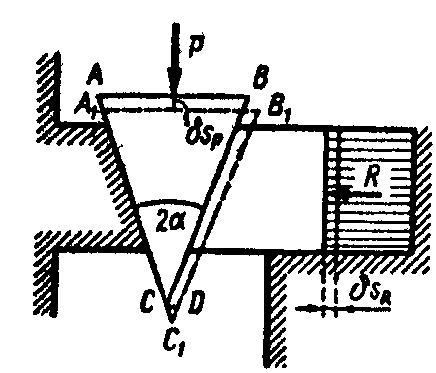
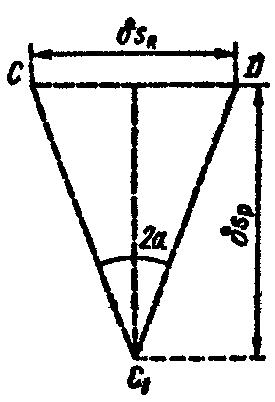
Рис. 12.13 Рис. 12.14
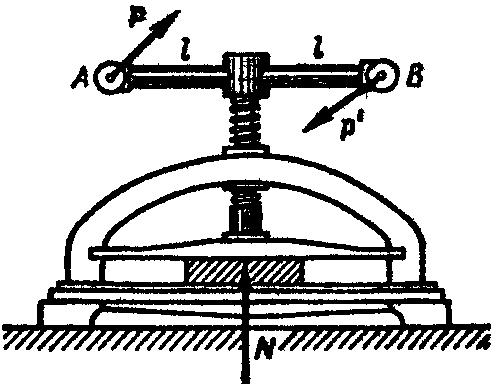
Рис. 12.15
Зависимость между возможными перемещениями то-чек приложения сил и установим из треугольника перемещений CC1D (рис. 12.14):
![]() .
.
Подставим
это значение
![]() в уравнение работ (12.5):
в уравнение работ (12.5):
![]() .
.
Разделим уравнение на :
![]() .
.
Винтовой
пресс. На
рис. 12.15 изображена схема винтового
пресса. Давление пресса на тело возникает
под действием пары сил (![]() ),
приложенной
к его рукоятке. Установим зависимость
реакции
сжимаемого тела от момента приложенной
пары сил, пользуясь принципом возможных
перемещений, Сообщим частям пресса
возможные перемещения, совпадающие с
их
истинными
перемещениями при работе пресса. Повернем
рукоятку АВ
на малый угол
),
приложенной
к его рукоятке. Установим зависимость
реакции
сжимаемого тела от момента приложенной
пары сил, пользуясь принципом возможных
перемещений, Сообщим частям пресса
возможные перемещения, совпадающие с
их
истинными
перемещениями при работе пресса. Повернем
рукоятку АВ
на малый угол
![]() в сторону действия пары сил. Тогда точка
приложения силы
получит возможное перемещение
в сторону действия пары сил. Тогда точка
приложения силы
получит возможное перемещение
![]() ,
направление которого противоположно
направлению силы
.
Составим уравнение работ в виде (12.5).
Работу пары сил определим по формуле
как произведение ее момента на приращение
угла поворота тела:
,
направление которого противоположно
направлению силы
.
Составим уравнение работ в виде (12.5).
Работу пары сил определим по формуле
как произведение ее момента на приращение
угла поворота тела:
![]() ,
,
где момент пары М == 2Р1.
При
одном обороте рукоятки винт перемещается
вдоль оси на величину h,
называемую шагом винта. Для определения
зависимости между
и
![]() воспользуемся тем, что продольное
перемещение винта
составляет такую же часть шага винта
h,
какую угловое перемещение
составляет от угла 2π, т. е.
воспользуемся тем, что продольное
перемещение винта
составляет такую же часть шага винта
h,
какую угловое перемещение
составляет от угла 2π, т. е.
![]() ,
,
откуда
![]() .
.
Подставим это значение в уравнение работ (12.5):
![]() .
.
Разделим уравнение на :
![]() .
.
Сила, сжимающая тело, равна найденной реакции N.
Стержневой
пресс. Найдем
соотношение между движущими силами
и
![]() ,
приложенными к вершинам А
и
В ромбического
четырехзвенника, и силой сопротивления
,
приложенной в точке D
пресса, если
=-
,
приложенными к вершинам А
и
В ромбического
четырехзвенника, и силой сопротивления
,
приложенной в точке D
пресса, если
=-![]() ;
длины стержней пресса указаны на рис.
12.16. Для установления этой зависимости
воспользуемся уравнением работ вида
(12.7), которое для сил, параллельных оси
у,
будет иметь вид
;
длины стержней пресса указаны на рис.
12.16. Для установления этой зависимости
воспользуемся уравнением работ вида
(12.7), которое для сил, параллельных оси
у,
будет иметь вид
![]() .
(а)
.
(а)
Проекции сил , и на ось у имеют вид
![]() .
.
Координаты точек приложения этих сил по оси у
![]() .
.
Проекции возможных перемещений этих точек на ось у находим, дифференцируя выражения, определяющие координаты этих точек:

Подставляем найденные значения в уравнение (а):
![]()
откуда
![]() .
(б)
.
(б)
Для установления зависимости между элементарными приращениями углов α и β воспользуемся уравнением, характеризующим связь:
![]() .
.
Дифференцируем это выражение:
![]()
откуда
![]() .
.
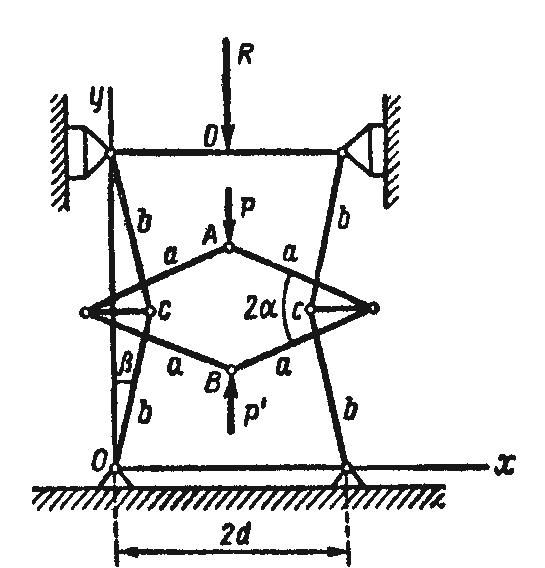
Рис. 12.16
Подставляем это значение в выражение (б):
![]() ,
,
отсюда получаем зависимость между величинами сил R и Р в виде
![]() .
.
Пример применения принципа возможных перемещений к определению реакции связей. В статике обычно приходится определять реакции связей, действующие на систему, не обладающую ни одной степенью свободы. Такой системой является каждое сооружение, несущее нагрузку, так как оно должно быть неизменяемым и неподвижно прикрепленным к земле.
В этом случае принцип освобождаемости от связей используют следующим образом.
Отбрасывают ту связь, реакцию которой требуется определить. Действие связи заменяют ее реакцией, которая переходит к числе задаваемых сил. При этом система, освобожденная от одной связи (если она статически определима), получает одну степень свободы. Системе сообщают возможное перемещение, соответствующее этой степени свободы.
Составляют уравнение работ в виде (12.5) или (12.7), в которое входят не только задаваемые силы, но и реакция отброшенной связи. Из этого уравнения сразу определяют искомую реакцию.
Для определения реакций других связей поступают так же, отбрасывая снова только одну связь, т. е. сообщая системе одну степень свободы.
Пример. Конструкция, образованная стержнями, соединенными на концах шарнирами, удерживается в указанном на рис. 12.17, а положении нитью AВ. Найти натяжение нити, вызываемое грузом G, подвешенным в точке D.
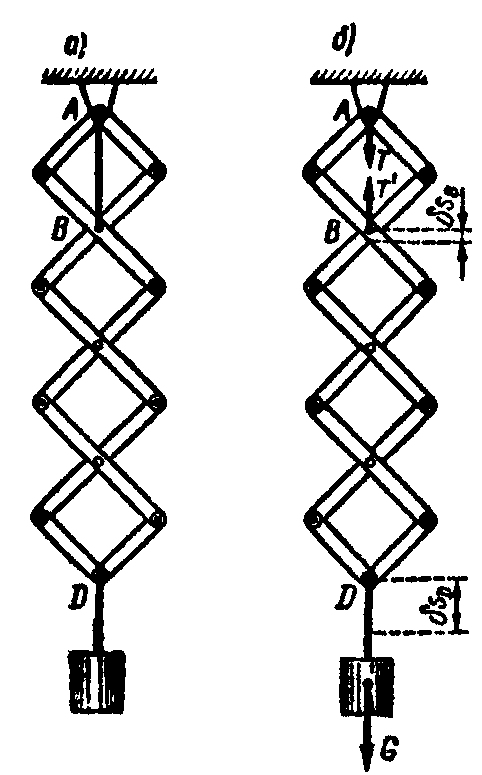
Рис. 12.17
Решение.
Чтобы определить натяжение нити АВ,
мысленно отбросим эту связь, заменив
ее действие на рассматриваемую систему
реакциями
![]() и
и
![]() ,
приложенными
в точках A
и B
(рис.
12.17,б). После отбрасывания связи система
получит одну степень свободы. Сообщим
этой системе возможное перемещение,
переместив точку D
вниз по вертикали. Тогда вертикальные
диагонали образованных стержнями ромбов
удлинятся на одну и ту же величину
,
приложенными
в точках A
и B
(рис.
12.17,б). После отбрасывания связи система
получит одну степень свободы. Сообщим
этой системе возможное перемещение,
переместив точку D
вниз по вертикали. Тогда вертикальные
диагонали образованных стержнями ромбов
удлинятся на одну и ту же величину
![]() .
Возможные
перемещения точек А,
В, D будут
.
Возможные
перемещения точек А,
В, D будут
![]() .
.
Составим уравнение работ в виде (12.5):
![]() ,
,
И отсюда найдем реакцию нити, равную ее натяжению:
![]() .
.
Пример. Балка, состоящая из двух брусьев, соединенных шарниром С, несет нагрузку Р (рис. 12.18, а). Размеры балки и расположение опор показаны на чертеже. Определить силу давления на опору В, вызываемую заданной нагрузкой.
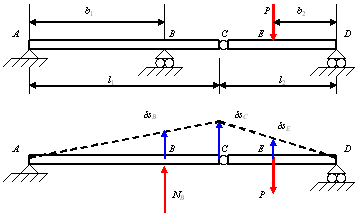
Рис. 12.18
Решение.
Отбрасываем опору В
и заменяем ее реакцией
![]() ,
численно
равной искомой силе давления (рис. 12.18,
б).
Сообщив системе возможное перемещение
(у нее теперь появилась одна степень
свободы), составляем условие
,
численно
равной искомой силе давления (рис. 12.18,
б).
Сообщив системе возможное перемещение
(у нее теперь появилась одна степень
свободы), составляем условие
![]() .
.
Связь
между
![]() и
и
![]() находим из пропорций:
находим из пропорций:
![]() ,
откуда
,
откуда
![]() .
.
Следовательно,
![]() .
.
При применении метода геометрической статики решение оказалось вы более длинным (пришлось бы рассмотреть равновесие частей балки и ввести дополнительно реакции других связей, а затем исключить эти реакции из полученной системы уравнений равновесия).
Лекция 13
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Принцип возможных перемещений в случае
движения СИСтемы. Общее уравнение Динамики
Принцип возможных перемещений дает общий метод решения задач статики. С другой стороны, принцип Даламбера позволяет использовать методы статики для решения задач динамики. Следовательно, применяя эти два принципа одновременно, мы можем получить общий метод решения задач динамики.
На основании принципа Германа - Эйлера - Даламбера для несвободной механической системы в любой момент временя геометрическая сумма равнодействующей задаваемых сил, равнодействующей реакций связей и силы инерции для каждой точки Mi механической системы равна нулю:
![]() .
.
Если
система получает возможное перемещение,
при котором каждая точка имеет
возможное перемещение
(рис. 13.1), то сумма работ этих сил на
перемещении
![]() должна быть равна нулю:
должна быть равна нулю:
![]() .
(13.1)
.
(13.1)
Суммируем все n уравнений (13.1):
![]() .
(13.2)
.
(13.2)
Положим, что все связи в рассматриваемой механической системе двусторонние и идеальные (силы трения, если они имеются, отнесены к числу задаваемых сил). Тогда сумма работ реакций связей на возможных перемещениях системы равна нулю:
![]()
При этом условии уравнение (13.2) имеет вид
![]() ,
,
или
![]() .
(13.3)
.
(13.3)
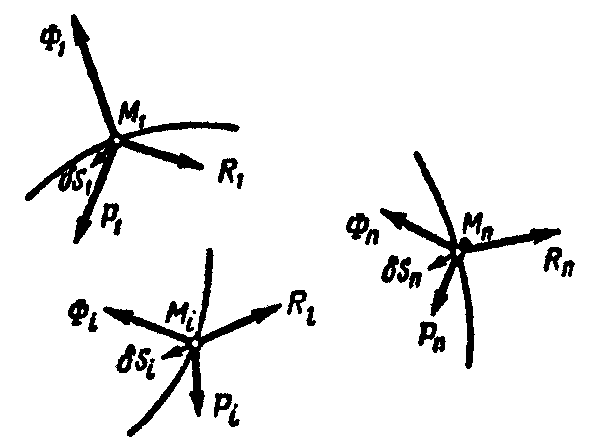
Рис. 13.1
Уравнение (13.3), называемое общим уравнением динамики, показывает, что в любой момент времени сумма работ всех задаваемой сил и сил инерции материальных точек несвободной механической системы с двусторонними идеальными связями на любом возможном ее перемещении равна нулю.
Если в каждую точку Мi системы из некоторого центра О провести вектор , то возможное перемещение этой точки будет соответствующим приращением радиуса-вектора точки:
![]() .
.
Так
как возможное перемещение точки не
обязательно направлено в сторону ее
действительного движения, то возможное
приращение радиуса-вектора
не всегда равно действительному
приращению, радиуса-вектора точки
![]() .
.
Работу задаваемых и сил инерции на возможных перемещениях точек системы можно представить в виде скалярных произведений. Тогда уравнение (13.3) примет вид
![]() ,
,
или
![]() .
(13.4)
.
(13.4)
Обозначим: Xi, Yi, Zi проекции задаваемых сил на неподвижные оси декартовых координат, Фix, Фiy, Фiz - проекции сил инерции , а δxi, δyi, δzi - проекции векторов возможных перемещений на те же оси.
Пользуясь аналитическим выражением элементарной работы, уравнению (13.4) можно придать следующий вид:
![]() .
(13.5)
.
(13.5)
Выразим проекции силы инерции точки на оси координат через проекции ее ускорения:
![]()
Подставив эти значения в уравнение (13.5), окончательно получим:
![]() .
(13.6)
.
(13.6)
Общее уравнение динамики (13.6) позволяет составить дифференциальные уравнения движения любой механической системы. Если механическая система состоит из отдельных твердых тел, то силы инерции точек каждого тела можно привести к силе, приложенной в некоторой точке тела, и паре сил. Сила равна главному вектору сил инерции точек этого тела, а момент пары равен главному моменту этих сил относительно центра приведения. Чтобы воспользоваться принципом возможных перемещений, к каждому телу прикладывают действующие на него задаваемые силы, а также условно прикладывают силу и пару, составленные силами инерции точек тела. Затем системе сообщают возможное перемещение и для всей совокупности задаваемых сил и приведенных сил инерции составляют уравнение (13.3) или (13.6). Если среди связей системы имеются односторонние, то для применения общего уравнения динамики необходимо, чтобы возможные перемещения системы не были освобождающими.