

2. Принцип возможных перемещений
При решении задач статики для определения реакций связей использовались уравнения равновесия твердого тела. При этом реакции связей не выделялись из общего числа приложенных к телу сил. В сложных несвободных механических системах определение реакций связей с помощью уравнений равновесия становится громоздким и потому малопригодным. В этих случаях целесообразно использовать принцип возможных перемещений, который формулируется так: необходимое и достаточное условие равновесия системы сил, приложенных к механической системе, подчиненной стационарным двусторонним и идеальным связям, заключается в равенстве нулю суммы элементарных работ задаваемых сил на любом возможном перемещении системы из рассматриваемого ее положения.
Чтобы доказать необходимость принципа, предположим, что несвободная механическая система, подчиненная стационарным двусторонним и идеальным связям, находится под действием уравновешивающихся сил. Тогда силы, действующие на каждую точку системы, должны также уравновешиваться, т. е.
![]()
или
![]() ,
,
где — равнодействующая задаваемых сил, приложенных к i-й точке системы; - равнодействующая реакций связей, приложенных к той же точке.
Мысленно
сообщим рассматриваемой системе
возможное перемещение из занимаемого
ею положения. Обозначим
![]() возможные перемещения точек системы
возможные перемещения точек системы
![]() .
(рис. 12.11). Вычислим сумму работ сил,
приложенных к каждой из точек системы,
при возможном перемещении этой точки.
Так как силы
и
равны и противоположны по направлению,
то
.
(рис. 12.11). Вычислим сумму работ сил,
приложенных к каждой из точек системы,
при возможном перемещении этой точки.
Так как силы
и
равны и противоположны по направлению,
то
![]() и работы этих сил на перемещении
,
равны по величине, но противоположны
по знаку. Поэтому сумма работ этих сил
равна нулю:
и работы этих сил на перемещении
,
равны по величине, но противоположны
по знаку. Поэтому сумма работ этих сил
равна нулю:
![]() .
.
Просуммируем все n уравнений, составленных для сил, приложенных к каждой точке системы:
![]() .
(12.4)
.
(12.4)
Предположим, что в рассматриваемой механической системе все связи являются стационарными, двусторонними и идеальными, а силы трения, если они имеются, отнесем к задаваемым силам. Тогда сумма работ реакций связей на возможных перемещениях должна быть равна нулю
![]() .
.
При этом условии уравнение (12.4) примет вид
![]() (12.5)
(12.5)
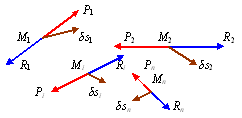
Рис. 12.11
Таким образом, необходимость принципа доказана.
Для доказательства достаточности принципа, т.е. существования равновесия сил при выполнении условий (12.5), рассуждение проведем от обратного. Предположим, что условие (12.5) выполнено, но силы, приложенные к системе, не уравновешиваются. В этом случае, если в начальный момент система находилась в покое, под действием не уравновешивающихся задаваемых сил и реакций связей она придет в движение и за малый промежуток времени совершит некоторое действительное перемещение, которое в случае стационарных связей будет возможным перемещением. Так как перемещение отдельных точек системы из состояния покоя произойдет в направлении равнодействующих сил и , то при этом будет совершена положительная работа
![]() .
.
Вторая сумма равна нулю, так как по условию связи системы идеальны. Следовательно,
![]() ,
,
что
противоречит принятому предположению
(12.5), т.е. доказана достаточность
принципа.
При односторонних связях уравнение
(12.5) остается справедливым лишь в том
случае, когда возможные перемещения
являются неосвобождающими. В общем же
случае при односторонних связях
![]() .
Если в каждую точку Мi
системы из некоторого центра О
провести вектор
,
то возможное перемещение этой точки
.
Если в каждую точку Мi
системы из некоторого центра О
провести вектор
,
то возможное перемещение этой точки
![]() будет соответствующим возможным
приращением радиуса-вектора точки:
будет соответствующим возможным
приращением радиуса-вектора точки:
![]() .
.
Тогда уравнение работ (12.5) примет вид
![]() .
(12.6)
.
(12.6)
Обозначим
проекции задаваемой силы
на неподвижные оси декартовых
координат Хi,Yi,
Zi,
а проекции возможного перемещения
на те же оси —
![]() .
Пользуясь аналитическим выражением
элементарной работы, представим уравнение
работ (12.5) в следующем виде:
.
Пользуясь аналитическим выражением
элементарной работы, представим уравнение
работ (12.5) в следующем виде:
![]() .
(12.7)
.
(12.7)
Если система, состоящая из большого числа тел, имеет одну степень свободы, то одно из равенств (12.5), (12.6) или (12.7) устанавливает сразу условие равновесия задаваемых сил, приложенных к системе. Если эта система имеет несколько степеней свободы, то уравнения работ составляются для каждого независимого перемещения системы в отдельности. Таким образом, получается столько условий равновесия системы, сколько степеней свободы она имеет. Рассмотрим одно из преобразований уравнения работ (12.5), применение которого к решению некоторых задач является полезным. Предположим, что смещение механической системы из состояния покоя происходит в течение ничтожно малого промежутка времени τ, и определим скорости, с которыми будут перемещаться точки системы:
![]() .
.
Эти скорости назовем возможными скоростями точек системы.
Направления векторов этих скоростей совпадают с направлениями возможных перемещений . Разделив уравнение работ (12.5) на величину τ, получим
![]() .
.
Учитывая,
что
![]() ,
а направление
совпадает с направлением
,
будем иметь
,
а направление
совпадает с направлением
,
будем иметь
![]() .
(12.8)
.
(12.8)
Уравнение (12.8) эквивалентно уравнению (12.5), но является не уравнением работ, а уравнением мощностей.