

Возможные (виртуальные) перемещения механической системы. Идеальные связи
Возможными (или виртуальными) перемещениями несвободной механической системы называются воображаемые бесконечно малые перемещения, допускаемые в данный момент наложенными на систему связями.
Возможные
перемещения точек механической системы
рассматривают как величины первого
порядка малости, пренебрегая при этом
величинами высших порядков малости.
Поэтому криволинейные перемещения
точек заменяют прямолинейными отрезками,
отложенными по касательным к траекториям
точек, и обозначают
![]() .
Так, например, возможным перемещением
рычага АВ
(рис. 12.6) является его поворот на бесконечно
малый угол
.
Так, например, возможным перемещением
рычага АВ
(рис. 12.6) является его поворот на бесконечно
малый угол
![]() вокруг точки О.
При этом повороте точки А
и В
должны переместиться по дугам окружностей
АА1
и ВВ1.
С точностью
до величин первого порядка малости эти
перемещения заменяют возможными
перемещениями
вокруг точки О.
При этом повороте точки А
и В
должны переместиться по дугам окружностей
АА1
и ВВ1.
С точностью
до величин первого порядка малости эти
перемещения заменяют возможными
перемещениями
![]() и
и
![]() в виде прямолинейных отрезков, отложенных
по касательным к траекториям точек, а
по величине равных
в виде прямолинейных отрезков, отложенных
по касательным к траекториям точек, а
по величине равных
![]() .
.
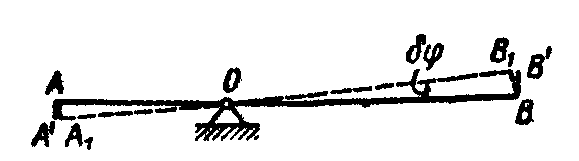
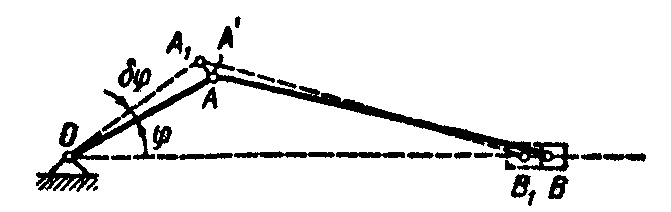
Рис. 12.6 Рис. 12.7
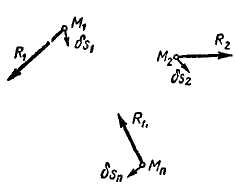
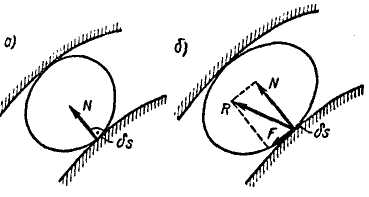
Рис. 12.8 Рис. 12.9
Возможным
перемещением кривошипного механизма,
изображенного на рис. 12.7, является
перемещение, соответствующее повороту
кривошипа ОА
на бесконечно малый угол
вокруг оси вала. Возможное перемещение
![]() пальца кривошипа А
представляет собой отрезок касательной
АА'
к дуге окружности с центром в точке
О,
равный по
величине
пальца кривошипа А
представляет собой отрезок касательной
АА'
к дуге окружности с центром в точке
О,
равный по
величине
![]() .
Возможным перемещением
.
Возможным перемещением
![]() ползуна В
является бесконечно малый отрезок BB1
прямолинейной траектории точки В.
Действительные
перемещения несвободной механической
системы, движущейся под действием
приложенных к ней сил, входят в число
ее возможных перемещений, являясь их
частным случаем. Однако это справедливо
лишь для стационарных связей. В случае
нестационарных связей действительные
перемещения системы не относятся к
числу ее возможных перемещений. Все
силы, действующие на несвободную
материальную точку или несвободную
механическую систему, делят на задаваемые
силы и
реакции связей.
ползуна В
является бесконечно малый отрезок BB1
прямолинейной траектории точки В.
Действительные
перемещения несвободной механической
системы, движущейся под действием
приложенных к ней сил, входят в число
ее возможных перемещений, являясь их
частным случаем. Однако это справедливо
лишь для стационарных связей. В случае
нестационарных связей действительные
перемещения системы не относятся к
числу ее возможных перемещений. Все
силы, действующие на несвободную
материальную точку или несвободную
механическую систему, делят на задаваемые
силы и
реакции связей.
Задаваемые силы выражают действие на механическую систему тел, вызывающих или стремящихся вызвать определенное ее движение.
Реакции
связей выражают действие связей,
ограничивающих движение механической
системы или препятствующих ему. Рассмотрим
механическую систему, состоящую из п
материальных точек M1,
М2,
..., Мn,
подчиненную связям; реакции связей
обозначим
![]() (рис. 12.8). Сообщим системе какое-либо
возможное перемещение; возможные
перемещения точек системы обозначим
(рис. 12.8). Сообщим системе какое-либо
возможное перемещение; возможные
перемещения точек системы обозначим
![]() .
Вычислим сумму работ реакции
,
на этих перемещениях. Если
сумма работ реакций связей на любом
возможном перемещении системы равна
нулю, то такие связи называются идеальными.
Согласно этому
определению,
для идеальных
связей
.
Вычислим сумму работ реакции
,
на этих перемещениях. Если
сумма работ реакций связей на любом
возможном перемещении системы равна
нулю, то такие связи называются идеальными.
Согласно этому
определению,
для идеальных
связей
![]() .
(12.3)
.
(12.3)
Предположим, что тело может скользить между параллельными гладкими поверхностями (рис. 12.9, a). Сообщим телу возможное перемещение и вычислим работу реакций связи на этом перемещении.
Считая, что давление тела передается на нижнюю поверхность, приложим к телу нормальную реакцию этой поверхности . Возможное перемещение точки приложения этой силы δs лежит в плоскости, касательной к опорной поверхности.
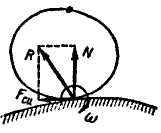
Рис. 12.10
Работа силы на перемещении δs равна
![]() .
.
Следовательно,
рассматриваемая двусторонняя связь
является идеальной, так как условие
(12.3) выполнено. Предположим теперь, что
тело может скользить между параллельными
шероховатыми поверхностями (рис. 12.9,
б).
Тогда реакция плоскости
состоит из нормальной реакции
и силы трения
.
Найдем сумму
работ этих составляющих реакции на
возможном перемещении
![]() :
:
![]() .
.
Следовательно,
рассматриваемая двусторонняя связь не
является идеальной, так как условие
(12.3) не выполнено. Отметим, что хотя
связь, осуществленная с трением, не
является идеальной, тем не менее такую
связь можно условно рассматривать как
идеальную. Для этого следует перевести
силы трения из группы реакций связей в
группу задаваемых сил. Тогда сумма работ
реакций (без сил трения) на возможных
перемещениях будет равна нулю, т.е.
условие (12.3) будет выполнено. В некоторых
случаях и шероховатая поверхность
является идеальной связью. Так,
например, если тело катится по неподвижной
шероховатой поверхности без скольжения,
то линия соприкосновения тел является
мгновенной осью вращения. Скорости
точек соприкосновения тел равны нулю,
а потому возможные перемещения
этих точек
равны нулю. В этом случае
![]() и работа реакции
,
являющейся геометрической суммой
нормальной составляющей и силы сцепления
на этом перемещении, равна нулю.
и работа реакции
,
являющейся геометрической суммой
нормальной составляющей и силы сцепления
на этом перемещении, равна нулю.
Таким образом, шероховатая поверхность, по которой катится без скольжения тело (рис. 12.10), также удовлетворяет условию (12.3). Условие (12.3), при котором связь является идеальной, относится не только к двусторонним, но и к односторонним связям. Однако в последнем случае должны рассматриваться лишь неосвобождающие возможные перемещения, которые оставались бы возможными и в случае, если бы данная связь была двусторонней.