

4. Теорема об изменении кинетической энергии механической системы
Установим
зависимость между изменением кинетической
энергии механической системы и работой
приложенных к ее точкам сил. Для этого
разделим силы, действующие на точки
![]() ,
на внешние силы
,
на внешние силы
![]() ,
и внутренние силы
,
и внутренние силы
![]() .
Применим к движению каждой точки Mi
теорему об изменении кинетической
энергии. Предположим, что при перемещении
механической системы из первого положения
во второе каждая точка Mi
перемещается из Мi1
в Мi2,
причем скорость ее изменяется от vi1
до vi2
(рис. 8).
.
Применим к движению каждой точки Mi
теорему об изменении кинетической
энергии. Предположим, что при перемещении
механической системы из первого положения
во второе каждая точка Mi
перемещается из Мi1
в Мi2,
причем скорость ее изменяется от vi1
до vi2
(рис. 8).
Тогда по ypавнению (10.3) для каждой материальной точки
![]() ,
,
где
![]() - работ силы
и
- работ силы
и
![]() -
работа силы
на перемещении Мi1Мi2.
-
работа силы
на перемещении Мi1Мi2.
Просуммируем левые и правые части составленных n равенств:
![]() .
.
Согласно
(10.5),
![]() -
кинетическая энергия системы в первом
ее положении;
-
кинетическая энергия системы в первом
ее положении;
![]() — кинетическая
энергия системы во втором положении.
— кинетическая
энергия системы во втором положении.
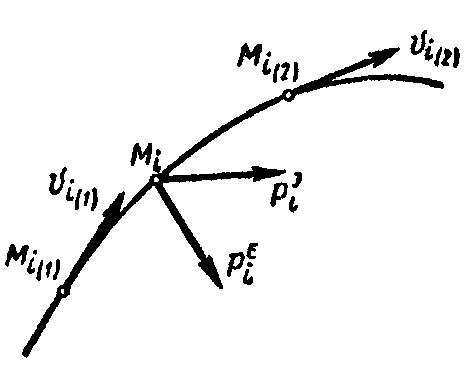
Рис. 10.8
Таким образом,
![]() .
(10.14)
.
(10.14)
Уравнение (10.14) выражает теорему об изменении кинетической энергии механической системы: изменение кинетической энергии механической системы на некотором перемещении равно сумме работ внешних и внутренних cuл, действующих на материальные точки системы на этом перемещении.
Сумма работ внутренних сил твердого тела на любом перемещении равна нулю, т. Е. . Для твердого тела уравнение (14) принимает вид
![]() ,
(10.15)
,
(10.15)
т. е. изменение кинетической энергии твердого meла на некотором перемещении равно сумме работ внешних сил, действующих на тело на этом перемещении.
Механический коэффициент полезного действия машины
Для установления мощности машины необходимо рассмотреть действующие на машину силы. Эти силы можно разделить на три категории:
1. Силы, совершающие положительную работу, называемые движущими силами, например давление пара на поршень в цилиндре паровой машины или газа в двигателе внутреннего сгорания.
2. Силы, совершающие отрицательную работу, называемые силами сопротивления. Силы сопротивления делятся на две группы:
а) полезные силы сопротивления - силы, для преодоления которых предназначена машина, например сопротивление поднимаемого машиной груза и т. д.;
б) вредные силы сопротивления - побочные силы сопротивления, как, например, силы трения, сопротивление воздуха и т. п.
3. Силы тяжести отдельных частей машины, совершающих попеременно то положительную, то отрицательную работу. Работа этих сил за полный цикл работы машины равна нулю, так как результирующее перемещение точки приложения каждой силы тяжести равно нулю.
При установившемся движении машины ее кинетическая энергия не изменяется и сумма работ приложенных к ней движущих сил и сил сопротивления равна нулю:
![]() .
.
Так как работа сил сопротивления отрицательна, то эту сумму можно представить в виде
![]() ,
,
или
![]()
т.е. при установившемся движении машины работа движущих сил равна абсолютной числовой величине работы сил сопротивления. Это значит, что работа, затрачиваемая на приведение машины в движение, расходуется на преодоление полезных и вредных сопротивлений:
![]()
Механический коэффициент полезного действия машины η при установившемся ее движении равен отношению полезной работы машины к работе, затраченной на приведение машины в движение:
![]() .
(10.16)
.
(10.16)
Если известны полезная мощность машины Nмаш и мощность двигателя, приводящего ее в движение Nдв то механический коэффициент полезного действия машины
![]() .
(10.17)
.
(10.17)
Пример. Состав из 50 вагонов весом 800 кН каждый движется по подъему i=tga=0,002. Сопротивление его движению составляет 3 Н на 1 кН веса. На протяжении 750 м скорость поезда изменяется от 18 до 36 км/ч. Определить силу тяги тепловоза.
Решение.
Рассматриваем поступательное движение
состава как движение материальной
точки. Применяем к его движению теорему
об изменения кинетической энергии
на перемещении МоМ1
(рис. 10.9).
Скорость поезда на этом перемещении
изменяется от
![]() =
18 км/ч
= 5 м/с
до
=
36 км/ч =
10 м/с.
На состав действуют постоянные по модулю
и направлению силы —сила тяги тепловоза
,
вес состава
,
нормальная реакция рельсов
и сила сопротивления движению
,
модуль которой равен 0,003G.
Составляем уравнение:
=
18 км/ч
= 5 м/с
до
=
36 км/ч =
10 м/с.
На состав действуют постоянные по модулю
и направлению силы —сила тяги тепловоза
,
вес состава
,
нормальная реакция рельсов
и сила сопротивления движению
,
модуль которой равен 0,003G.
Составляем уравнение:
![]() .
(10.18)
.
(10.18)
Работу силы тяги на перемещении МоМ1 определяем по формуле:
![]() .
.
Работа силы тяжести зависит только от вертикального перемещения Н :
![]() .
.
Так как угол а мал, то sin а ≈tg а= i и
![]() .
.
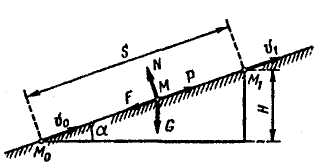
Рис. 10.9
Работа силы перпендикулярной перемещению, равна нулю.
Работа силы сопротивления определяется по формуле:
![]() .
.
Подставляем в уравнение (10.18) значение массы состава т= G/g и значения работы всех приложенных к нему сил:
![]() ,
,
откуда
![]() .
.
Подставляя числовые значения, находим модуль силы тяги тепловоза:
![]() .
.
Задача 3. Определение скорости и ускорения тела с помощью теоремы об изменении кинетической энергии механической системы
Механическая система под действием сил тяжести приходит в движение из состояния покоя. Учитывая трение скольжения тела 3, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость и ускорение тела 1 в тот момент, когда пройденный им путь станет равным S ( рис1, а).
В
задаче принять
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() см,
см,
![]() ,
,
![]() ,
,
![]() м.
м.
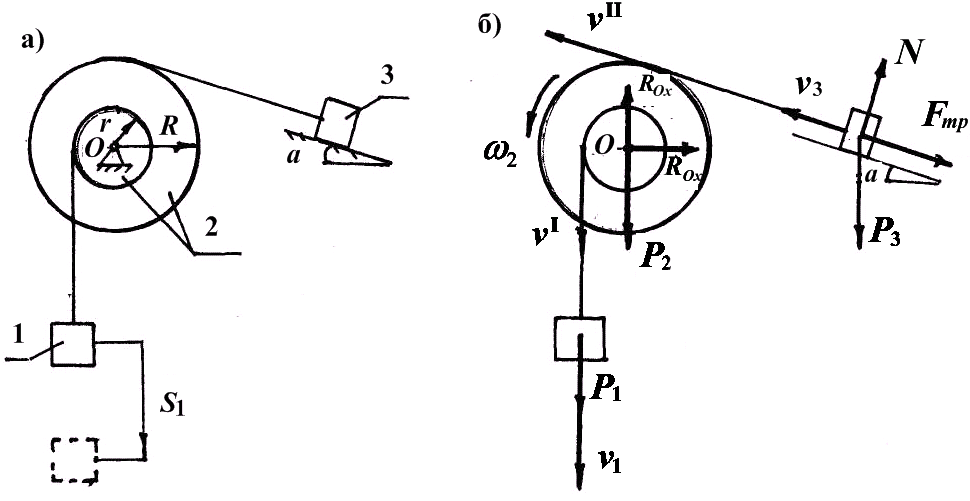
Рис. 1
Решение.
1.
Составление расчетной схемы. На
механическую систему действуют активные
силы
![]() .
Применяя принцип освобождаемости от
связей только к внешним связям системы,
покажем реакции шарнирно-неподвижной
опоры тела 2 и шероховатой наклонной
поверхности. Направления скоростей тел
системы изобразим с учетом того, что
тело 1 спускается (рис1, б).
.
Применяя принцип освобождаемости от
связей только к внешним связям системы,
покажем реакции шарнирно-неподвижной
опоры тела 2 и шероховатой наклонной
поверхности. Направления скоростей тел
системы изобразим с учетом того, что
тело 1 спускается (рис1, б).
2. Выбор теоремы. Задачу решим применяя теорему об изменении кинетической энергии системы.
![]() ,
,
где
![]() и Т
- кинетическая энергия системы в начальном
и конечном положениях;
и Т
- кинетическая энергия системы в начальном
и конечном положениях;
![]() - алгебраическая сумма работ внешних
сил, приложенных к системе, на перемещении
системы из начального положения в
конечное;
- алгебраическая сумма работ внешних
сил, приложенных к системе, на перемещении
системы из начального положения в
конечное;
![]() -
сумма работ внутренних сил системы на
том же перемещении.
-
сумма работ внутренних сил системы на
том же перемещении.
Для рассматриваемой системы, состоящей из абсолютно твердых тел, соединенных нерастяжимыми нитями
![]() .
.
Так как в начальном положении система покоилась, то = 0. Следовательно,
![]() .
.
3. Составление уравнения.
а) Определение кинетической энергии системы в конечном положении. Кинетическая энергия системы представляет собой сумму кинетических энергий тел 1, 2 и З.
![]() .
.
Кинетическая энергия груза 1, движущегося поступательно
![]() .
.
Кинетическая энергия блока 2, совершающего вращение вокруг оси Oz, перпендикулярной плоскости чертежа
![]() .
.
Кинетическая энергия тела 3 в его поступательном движении
![]() .
.
Таким образом,
![]() .
(1)
.
(1)
Выражение
кинетической энергии содержит неизвестные
скорости всех тел системы, а определить
необходимо
![]() ,
поэтому избавимся от лишних неизвестных,
составив уравнения связей.
,
поэтому избавимся от лишних неизвестных,
составив уравнения связей.
б) Уравнения связей.
Уравнения связей это не что иное, как кинематические соотношения между скоростями и перемещениями точек системы. При составлении уравнений связей выразим все неизвестные скорости и перемещения тел системы через скорость и перемещение груза 1.
Скорость
любой точки обода блока малого радиуса
![]() равна скорости тела 1, а также произведению
угловой скорости тела 2 и радиуса вращения
равна скорости тела 1, а также произведению
угловой скорости тела 2 и радиуса вращения
![]() :
:
![]() .
.
Отсюда выразим угловую скорость тела 2
![]() .
(2)
.
(2)
Вращательная
скорость любой точки обода блока большого
радиуса
![]() с одной стороны равна произведению
угловой скорости блока и радиуса
вращения, а с другой - скорости тела 3.
с одной стороны равна произведению
угловой скорости блока и радиуса
вращения, а с другой - скорости тела 3.
![]() .
.
Подставив значение угловой скорости, получим
![]() .
(3)
.
(3)
Проинтегрировав при нулевых начальных условиях выражения (2) и (3), запишем соотношение перемещений точек системы
![]() .
(4)
.
(4)
![]() .
(5)
.
(5)
Зная основы зависимости скоростей точек системы, вернемся к выражению кинетической энергии (1) и подставим в него уравнения (2) и (3).
 .
.
Заметим, что момент инерции тела 2 равен
![]() .
.
Подставляя значения масс тел и момента инерции тела 2, запишем
![]() .
.
в) Определение суммы работ всех внешних сил системы на заданном перемещении.
![]() .
.
Работа силы тяжести тела 1
![]() .
.
Работа
сил
![]() ,
,
![]() ,
,
![]() равна нулю, так как эти силы приложены
к неподвижной точке.
равна нулю, так как эти силы приложены
к неподвижной точке.
![]() .
.
Работа силы тяжести тела 3
![]() .
.
Работа нормальной реакции тела 3 равна нулю, так как сила перпендикулярна направлению движения
![]() .
.
Работа
силы трения скольжения
![]()
![]() ,
,
так как
![]() ,
,
то
![]() .
.
Сумма работ внешних сил
![]()
Подставляя значения масс тел, соотношение перемещений (5) и числовые параметры запишем

Теперь, согласно теореме об изменении кинетической энергии системы приравняем значения Т и
![]() .
(6)
.
(6)
4. Определение неизвестных.
Скорость тела 1 получим из выражения (6)
![]()
Ускорение тела 1 можно подсчитать, продифференцировав по времени равенство (6)
![]() ,
,
где
![]() .
.
Тогда
![]() .
.
Пример.
Груз 1 массы
![]() ,
опускающийся без раскачивания под
действием силы тяжести, приводит в
движение через посредство троса и
двухступенчатого блока 2 каток 3 массы
,
опускающийся без раскачивания под
действием силы тяжести, приводит в
движение через посредство троса и
двухступенчатого блока 2 каток 3 массы
![]() ,
поднимающийся по наклонной плоскости,
образующей с горизонтом угол
,
поднимающийся по наклонной плоскости,
образующей с горизонтом угол
![]() (рис. 5.10). Определить ускорение груза,
если I2
- момент инерции блока относительно оси
вращения; R2,
r2
- радиусы ступеней блока; I3
- момент инерции катка относительно
оси, проходящей через центр масс; R3
- радиус катка;
(рис. 5.10). Определить ускорение груза,
если I2
- момент инерции блока относительно оси
вращения; R2,
r2
- радиусы ступеней блока; I3
- момент инерции катка относительно
оси, проходящей через центр масс; R3
- радиус катка;
![]() - коэффициент трения качения. Качение
катка происходит без скольжения. Массой
троса пренебречь. Сопротивление на оси
блока не учитывать.
- коэффициент трения качения. Качение
катка происходит без скольжения. Массой
троса пренебречь. Сопротивление на оси
блока не учитывать.
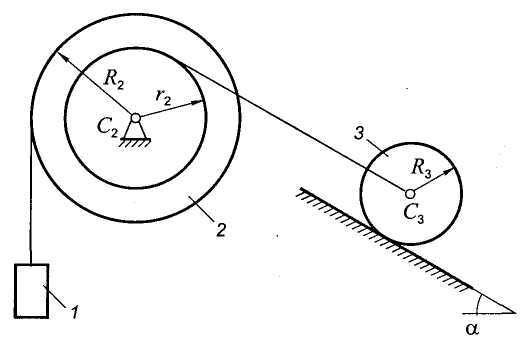
Рис. 5.10
Решение. Рассмотрим систему, состоящую из тел 1-3 и троса. Эта система имеет одну степень свободы, поскольку тела, входящие в ее состав, являются абсолютно твердыми, трос нерастяжимым, качение катка происходит без скольжения, а раскачивание при движении груза отсутствует. Так как целью задачи является определение ускорения груза, то в качестве параметра, определяющего положение системы, естественно принять координату х центра масс груза (рис. 5.11).
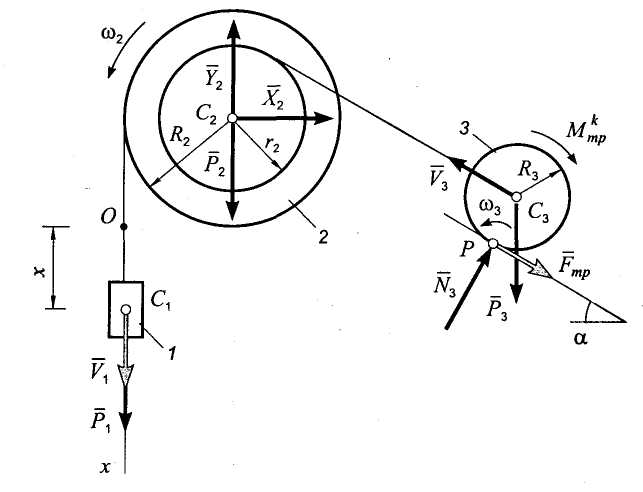
Рис. 5.11
Составим дифференциальное уравнение движения системы. Воспользуемся для этой цели теоремой об изменении кинетической энергии в дифференциальной форме для неизменяемых систем
![]() . (5.78)
. (5.78)
Определим кинетическую энергию системы как сумму кинетических энергий тел, входящих в ее состав:
![]() .
.
Кинетическая энергия груза, движущегося поступательно со скоростью v1
![]() .
.
Кинетическая
энергия блока, вращающегося вокруг
неподвижной оси С2
с угловой скоростью
![]() ,
,
![]() .
.
Кинетическая энергия катка, совершающего плоское движение
![]() .
.
где
![]() - угловая скорость катка;
- угловая скорость катка;
![]() - скорость его центра масс.
- скорость его центра масс.
Таким образом, кинетическая энергия системы
![]() .
.
Поскольку
![]() .
(5.79)
.
(5.79)
то
 ,
,
или
![]() ,
,
где
 .
.
Таким
образом, кинетическая энергия системы
представлена в форме кинетической
энергии твердого тела массы
![]() ,
совершающего поступательное движение
со скоростью, равной скорости груза.
,
совершающего поступательное движение
со скоростью, равной скорости груза.
Поскольку приведенная масса является постоянной величиной, то
![]() .
(5.80)
.
(5.80)
Определим
мощность внешних сил. Внешними силами,
действующими на систему, являются
силы тяжести тел
![]() ,
реакции подшипников оси блока
,
реакции подшипников оси блока
![]() и реакции плоскости: нормальная реакция
и реакции плоскости: нормальная реакция
![]() ,
сила трения
,
сила трения
![]() и момент трения качения
и момент трения качения
![]() .
Заметим, что мощности сил
.
Заметим, что мощности сил
![]() равны нулю, так как эти силы приложены
в точках, скорости которых равны нулю:
точка С2
неподвижна, а точка Р
является мгновенным центром скоростей
катка. Мощности остальных сил отличны
от нуля: мощность силы тяжести груза
равна
равны нулю, так как эти силы приложены
в точках, скорости которых равны нулю:
точка С2
неподвижна, а точка Р
является мгновенным центром скоростей
катка. Мощности остальных сил отличны
от нуля: мощность силы тяжести груза
равна
![]() ;
мощность силы тяжести катка равна
;
мощность силы тяжести катка равна
![]() ;
мощность момента трения качения равна
;
мощность момента трения качения равна
![]() ,
где
,
где
![]() ,
причем нормальная реакция плоскости
,
причем нормальная реакция плоскости
![]() .
.
Таким образом, мощность внешних сил
![]() .
.
Подставляя в последнюю формулу соотношения (5.79) и учитывая значение момента трения качения, получаем
 ,
,
или
![]() ,
(5.81)
,
(5.81)
где
 .
.
Приравнивая, согласно (5.78), правые части соотношений (5.80) и (5.81), получаем дифференциальное уравнение движения системы
![]() .
(5.82)
.
(5.82)
Поскольку
приведенная сила
![]() является постоянной величиной, то
проекция ускорения груза на ось х
является постоянной величиной, то
проекция ускорения груза на ось х
![]() .
.
Пример.
Двухступенчатый барабан 1 имеет
горизонтальную ось вращения С1.
На ступени барабана навиты нити, к концам
которых привязаны грузы 2 и 3 равной
массы т,
причем груз 3 стоит на плоскости (рис.
5.12). В некоторый момент времени грузу 2
сообщается скорость
![]() ,
направленная вертикально вниз. На какую
высоту Н поднимется груз 3 над плоскостью,
если R, r
- радиусы ступеней барабана;
I
- момент инерции барабана относительно
оси вращения; Мс
- постоянный момент сопротивления на
оси барабана. Массу нитей не учитывать.
Грузы при движении не раскачиваются.
,
направленная вертикально вниз. На какую
высоту Н поднимется груз 3 над плоскостью,
если R, r
- радиусы ступеней барабана;
I
- момент инерции барабана относительно
оси вращения; Мс
- постоянный момент сопротивления на
оси барабана. Массу нитей не учитывать.
Грузы при движении не раскачиваются.
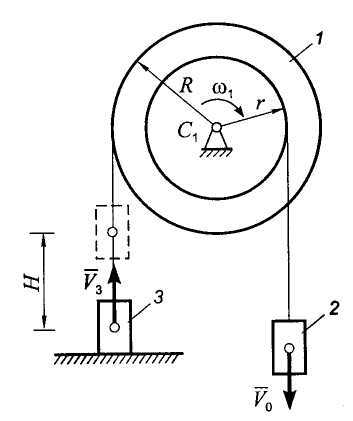
Рис. 5.12
Решение. Рассмотрим систему, состоящую из тел 1-3 и нитей. Поскольку тела, входящие в ее состав, являются абсолютно твердыми, нити нерастяжимыми, а раскачивание грузов при движении отсутствует, то система имеет одну степень свободы. Так как движение системы происходит под действием постоянных сил, работу которых можно вычислить, не зная закона движения системы, то для решения задачи удобно использовать теорему об изменении кинетической энергии в конечной форме для неизменяемых систем
![]() .
(5.83)
.
(5.83)
Определим приращение кинетической энергии системы на рассматриваемом перемещении. Кинетическая энергия системы в начальном положении равна сумме кинетических энергий барабана, вращающегося вокруг неподвижной оси, и грузов, движущихся поступательно:
![]() .
.
где - угловая скорость барабана в начальном положении; v3 -скорость груза 3 в начальном положении (рис. 5.12).
Поскольку
![]() ,
,
то
 .
.
Так как кинетическая энергия системы в конечном положении Т=0,то
 .
(5.84)
.
(5.84)
Вычислим
теперь работу внешних сил на перемещении
системы из начального положения в
конечное. Внешними силами, действующими
на рассматриваемую систему, являются
силы тяжести тел
,
реакции подшипников оси барабана
![]() и момент сопротивления Мс.
(рис. 5.13). Работа силы тяжести барабана
равна нулю, так как эта сила приложена
в неподвижной точке: центр масс барабана
расположен на оси вращения. Работа силы
тяжести груза 2 равна
и момент сопротивления Мс.
(рис. 5.13). Работа силы тяжести барабана
равна нулю, так как эта сила приложена
в неподвижной точке: центр масс барабана
расположен на оси вращения. Работа силы
тяжести груза 2 равна
![]() ,
где h
- высота, на которую опустится груз
2 при переходе из начального положения
в конечное. Работа силы тяжести груза
3 равна
,
где h
- высота, на которую опустится груз
2 при переходе из начального положения
в конечное. Работа силы тяжести груза
3 равна
![]() .
Работа момента сопротивления равна
.
Работа момента сопротивления равна
![]() ,
где
,
где
![]() -угол поворота барабана.
-угол поворота барабана.
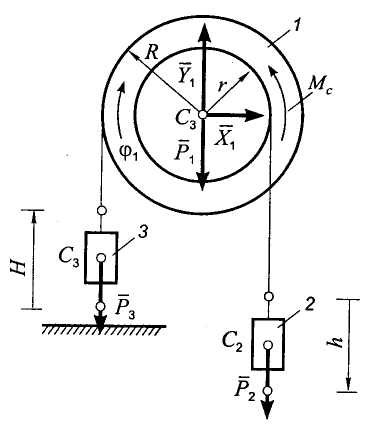
Рис. 5.13
Таким образом,
![]() .
.
Но
![]() ,
,
поэтому
![]() .
(5.85)
.
(5.85)
Приравнивая, согласно (5.83), правые части формул (5.84) и (5.85)
находим
 ,
,
находим
 .
.
Пример. Груз 3 массы т3 перемещается по наклонной плоскости, образующей угол с горизонтом, электрической лебедкой, состоящей из зубчатого колеса 1 радиуса R1 и находящегося с ним в зацеплении колеса 2 радиуса R2, на одном валу с которым находится барабан радиуса r2, на который навивается трос, прикрепленный к грузу (рис. 5.14).
К колесу 1 приложен со стороны мотора постоянный вращающий момент М1 на валу колеса 2 действует постоянный момент сопротивления М2. Определить угловую скорость колеса 1 как функцию его угла поворота, если I1 - момент инерции ведущего вала (вал и колесо l); I2- момент инерции ведомого вала (вал, колесо 2 и барабан); f -коэффициент трения скольжения груза о наклонную плоскость. Трос считать нерастяжимым, невесомым и не сопротивляющимся изменению формы. Движение начинается из состояния покоя. Центры масс вращающихся тел находятся на осях вращения.
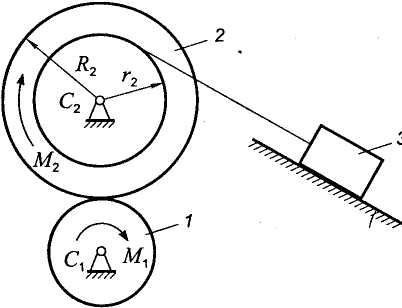
Рис. 5.14
Решение. Рассмотрим систему, состоящую из тел 1-3 и троса. Поскольку тела абсолютно твердые, а трос нерастяжимый, то система имеет одну степень свободы. Будем определять положение системы с помощью угла поворота ведущего вала. Заметим также, что система является неизменяемой. Поскольку движение системы происходит под действием постоянных сил, работу которых можно вычислить, не зная закона движения системы, то для решения задачи удобно использовать теорему об изменении кинетической энергии в конечной форме для неизменяемых систем
. (5.86)
Определим приращение кинетической энергии системы на перемещении из начального положения в некоторое конечное, задаваемое углом . Кинетическая энергия системы в начальном положении Т0= 0 (по условию). Кинетическая энергия системы в конечном положении равна сумме кинетических энергий ведущего и ведомого валов и груза:
![]() ,
,
где
![]() - угловая скорость ведущего и ведомого
валов соответственно; v3
- скорость груза (рис. 5.15).
- угловая скорость ведущего и ведомого
валов соответственно; v3
- скорость груза (рис. 5.15).
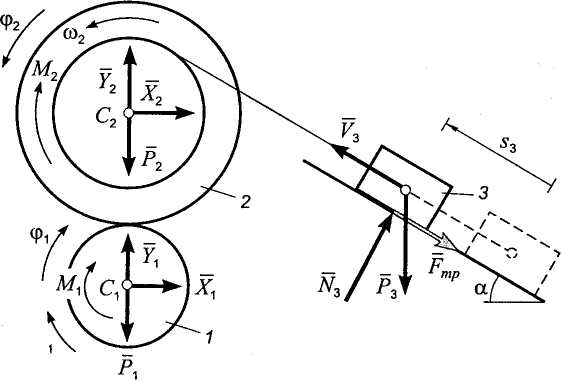
Рис. 5.15
Поскольку
![]() ,
,
то
 ,
,
или
![]() ,
,
где
 .
.
Таким образом, приращение кинетической энергии системы на рассматриваемом перемещении найдено как функция угловой скорости ведущего вала в конечном положении:
![]() .
(5.87)
.
(5.87)
Внешними
силами, действующими на систему, являются
вращающий момент М1
момент сопротивления М2,__сты
тяжести тел
,
реакции подшипников ведущего вала
,
реакции подшипников ведомого вала
![]() и реакции плоскости: сила трения
и нормальная реакция
.
Вычислим теперь работу внешних сил на
перемещении системы из начального
положения в конечное:
и реакции плоскости: сила трения
и нормальная реакция
.
Вычислим теперь работу внешних сил на
перемещении системы из начального
положения в конечное:
1)
работа вращающего момента равна
![]() ;
;
2)
работа момента сопротивления равна
![]() ,
где
,
где
![]() -угол
поворота
ведомого вала;
-угол
поворота
ведомого вала;
3)
работы сил
![]() ,
а также
,
а также
![]() ,
равны нулю, так как
эти силы приложены
в неподвижных точках;
,
равны нулю, так как
эти силы приложены
в неподвижных точках;
4) работа силы равна нулю, так как эта сила перпендикулярна перемещению точки ее приложения;
5)
работа силы
![]() равна
равна
![]() ,
где s3
- перемещение груза;
,
где s3
- перемещение груза;
6)
работа силы трения равна (![]() ),
где
),
где
![]() .
.
Таким образом,
![]() .
.
Но
![]() ,
,
поэтому
![]() .
.
или
![]() ,
(5.88)
,
(5.88)
где
![]() .
.
Приравнивая, согласно (5.86), правые части формул (5.87) и (5.88), получаем
![]() ,
,
откуда
![]() .
(5.89)
.
(5.89)
Таким образом, искомая зависимость имеет вид:
![]() .
.
Лекция 11
ПРИНЦИП ГЕРМАНА-ЭЙЛЕРА-ДАЛАМБЕРА ДЛЯ
МАТЕРИАЛЬНОЙ ТОЧКИ И МЕХАНИЧЕСКОЙ СИСТЕМЫ
Принцип Германа-Эйлера-Даламбера для
материальной точки и механической
системы
Принцип
Германа - Эйлера - Даламбера называют
общий метод, с помощью которого уравнениям
динамики по форме придается вид уравнений
статики. Этот метод, предложенный в 1716
г. Германом и обобщенный в 1737 г. Эйлером,
получивший название петербургского
принципа, часто называют началом
или принципом
Даламбера, хотя действительная сущность
начала Даламбера не аналогична
петербургскому принципу. Предположим,
что материальная точка М
под действием
системы сил
![]() движется с ускорением
(рис. 11.1). Основное уравнение динамики
имеет вид
движется с ускорением
(рис. 11.1). Основное уравнение динамики
имеет вид
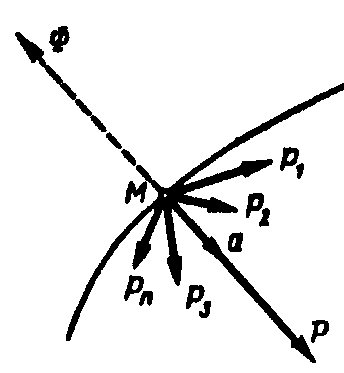
Рис. 1
![]()
Перенесем
член т![]() из левой части уравнения в правую:
из левой части уравнения в правую:
![]() .
.
Так
как
![]() ,
то
,
то
![]() .
(11.1)
.
(11.1)
Полученное соотношение формулируется так: геометрическая сумма всех приложенных к точке сил и силы инерции этой точки равны пулю.
Это означает, что для решения задачи динамики материальной точки по принципу Германа — Эйлера — Даламбера следует помимо приложенных к точке М сил условно приложить к этой точке силу инерции . Тогда многоугольник рассматриваемой системы сил , будет замкнут и суммы их проекций на координатные оси будут равны нулю.
Как известно, в действительности сила инерция материальной точки приложена не к ней, а к телу, сообщающему точке ускорение. Приложение силы инерции к точке является лишь условным, приемом, сводящим задачу динамики по форме решения к задаче статики. Благодаря простоте этот метод получил широкое применение во многих прикладных дисциплинах. В ряде случаев он обеспечивает наиболее простое и удобное решение задач динамики.