

2. Теорема о кинетической энергии механической системы в общем случае движения
Кинетическая энергия механической системы определяется как сумма значений кинетической энергии всех входящих в эту систему материальных точек:
![]() .
(10.5)
.
(10.5)
Положим, что система материальных точек M1, М2,..., Мi,…,Mn движется как yгодно в пространстве (рис. 10.2). Выберем неподвижную систему отсчета Охуz. В качестве подвижной системы отсчета возьмем систему осей , проведенных через центр масс системы параллельно неподвижным осям х, у, z и движущихся с центром масс поступательно. Тогда абсолютное движение системы точек можно рассматривать как совокупность поступательного движения системы вместе с центром масс (переносное движение) и относительного движения системы по отношению к центру масс.
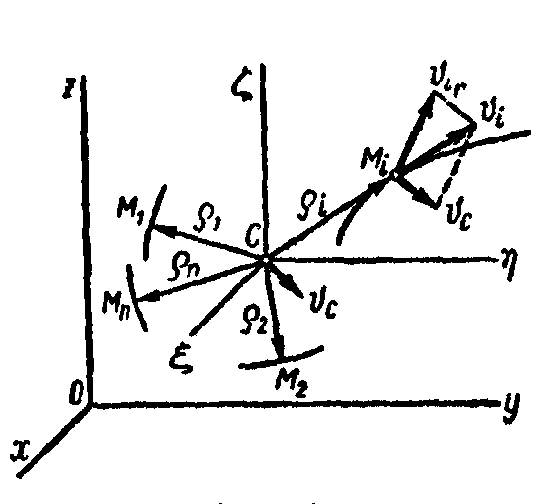
Рис. 10.2
Абсолютная скорость любой точки Mi механической системы определится как геометрическая сумма скорости центра масс и относительной скорости этой точки в ее движении относительно центра масс:
![]() (10.6)
(10.6)
Из векторной алгебры известно, что скалярное произведение двух одинаковых векторов равно квадрату их модуля. Действительно,
 .
.
Преобразуем выражение кинетической энергии (10.5), учитывая формулу (10.6):
 (10.7)
(10.7)
В полученном выражении первое слагаемое можно преобразовать:
![]() .
.
Покажем,
что второе слагаемое равно нулю. Для
этого проведем через центр масс С
радиус-векторы
![]() во все точки системы. Радиус-вектор
центра масс
во все точки системы. Радиус-вектор
центра масс
![]() .
.
Согласно формуле,
![]() .
.
Следовательно,
![]() .
.
Так
как радиус-вектор
проведен из начала координат подвижной
системы отсчета, то производная
![]() представляет собой относительную
скорость точки
представляет собой относительную
скорость точки
![]() :
:
![]()
На основании
![]() .
.
Тогда выражение (10.7), определяющее кинетическую энергию системы, принимает вид
![]() .
(10.8)
.
(10.8)
Равенство (10.8) выражает теорему о кинетической энергии механической системы: кинетическая энергия механической системы равна cумме кинетической энергии центра масс системы, масса которого равна массе всей системы, и кинетической энергии этой системы в ее относительном движении относительно центра масс. Эта теорема была установлена голландским математиком С. Кенигом (1751).
3. Кинетическая энергия твердого тела
В настоящем параграфе получены формулы для вычисления кинетической энергии твердого тела во всех случаях движения.
Поступательное движение твердого тела. При поступательном движении твердого тела скорости всех его точек в каждый момент времени геометрически равны между собой (рис. 10.3). Кинетическая энергия тела определится (10.5):
![]() .
.
Так
как
![]() ,
то окончательно
,
то окончательно
![]() .
(10.9)
.
(10.9)
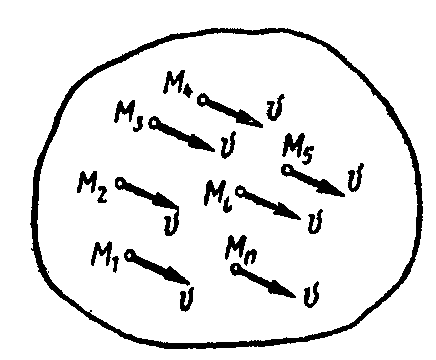
Рис. 10.3
На основании (10.9) устанавливаем, что кинетическая энергия твердого тела, движущегося поступательно, равна половине произведения массы тела на квадрат его скорости. Таким образом, кинетическая энергия твердого тела, движущегося поступательно, вычисляется кик кинетическая энергия материальной точки, имеющей массу этого тела.
Вращение твердого тела вокруг неподвижной оси. При вращении твердого тела вокруг неподвижной оси (рис. 10.4) скорость любой точки тела определяется как вращательная скорость:
![]() .
.
Кинетическую энергию твердого тела определяем по формуле (10.5):
![]() .
.
Здесь
![]() -момент инерции тела относительно оси
вращения.
-момент инерции тела относительно оси
вращения.
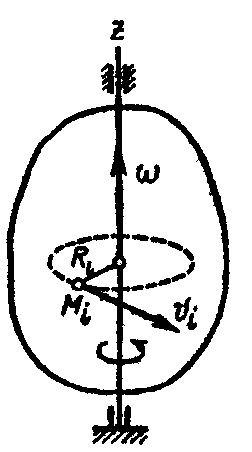
Рис. 10.4
Кинетическая энергия тела
![]() (10.10)
(10.10)
На основании (10.10) устанавливаем, что кинетическая энергия твердого тела, вращающегося вокруг неподвижной оси, равна половине произведения его момента инерции относительно оси вращения на квадрат угловой скорости тела.
Сравнив формулы (10.10) и (10.9), можно заметить, что при вращении тела его момент инерции играет такую же роль, как его масса при. поступательном движении.
Плоское
движение твердого тела.
Предположим, что при плоском движении
твердого тела его центр масс С
движется в плоскости чертежа (рис. 10.5).
Разложим это движение на поступательное
движение вместе с центром масс и
относительное движение по отношению к
центру масс. В этом случае относительное
движение представляет собой вращение
тела вокруг оси
![]() ,
проходящей
через центр
мисс С
перпендикулярно плоскости чертежа.
Определим кинетическую энергию тела
по теореме Кенига (10.8):
,
проходящей
через центр
мисс С
перпендикулярно плоскости чертежа.
Определим кинетическую энергию тела
по теореме Кенига (10.8):

Рис. 10.5
![]() .
(10.11)
.
(10.11)
Здесь
![]() - кинетическая энергия тела в поступательном
движении вместе с центром масс, а
- кинетическая энергия тела в поступательном
движении вместе с центром масс, а
![]() - кинетическая энергия во вращении
тела вокруг подвижной оси
,
определенная на основании формулы
(10.10).
- кинетическая энергия во вращении
тела вокруг подвижной оси
,
определенная на основании формулы
(10.10).
Сферическое движение твердого тела. Скорости точек твердого тела при сферическом движении в каждый момент можно рассматривать как вращательные вокруг мгновенной оси вращения (рис. 10.6). Поэтому кинетическая энергия тела, совершающего сферическое движение в данный момент, определяется по формуле
![]() ,
(10.12)
,
(10.12)
где ω — мгновенная угловая скорость тела; JΩ - момент инерции твердого тела относительно мгновенной оси вращения.

Рис. 10.6
Выражение (10.12) показывает, что кинетическая энергия твердого тела, совершающего сферическое движение, равна половине произведения момента инерции тела относительно мгновенной оси вращения на квадрат угловой скорости тела.
При
этом значение момента инерции
![]() непрерывно изменяется, так как изменяется
положение мгновенной оси Ω
относительно
тела.
непрерывно изменяется, так как изменяется
положение мгновенной оси Ω
относительно
тела.
Общий случай движения твердого тела. Движение свободного твердого тела в общем случае можно разложить на два составляющих движения: на переносное поступательное движение вместе с центром масс и относительное сферическое движение относительно центра масс (рис. 10.7).

Рис. 10.7
Тогда кинетическая энергия тела определится по формуле Кенига:
![]() .
(10.13)
.
(10.13)
Таким образом, кинетическая энергия твердого тела в общем случае его движения равна сумме кинетической энергии тела в его переносном nоcmyпательном движении вместе с центром масс и его кинетической энергии в сферическом движении относительно центра масс.