

4. Работа сил, приложенных к твердому телу.
Работа внутренних сил. Твердое тело представляет собой механическую систему, расстояния между точками которой остаются неизменными.
Рассмотрим
две произвольные точки твердого тела
М1
и M2
(рис. 9.13).
Обозначим
![]() силу,
действующую на точку М1
со стороны точки М2,
а
силу,
действующую на точку М1
со стороны точки М2,
а
![]() - силу, действующую на точку М2
со стороны точки М1.
Эти
внутренние силы на основании закона
равенства действия и противодействия
равны по модулю и противоположны по
направлению, т. е.
- силу, действующую на точку М2
со стороны точки М1.
Эти
внутренние силы на основании закона
равенства действия и противодействия
равны по модулю и противоположны по
направлению, т. е.
=– . (9.24)
Предположим,
что точки М1
и М2
имеют в данный момент скорости
![]() и
и
![]() и за промежуток времени их элементарные
перемещения, направленные вдоль
векторов скоростей, равны
и за промежуток времени их элементарные
перемещения, направленные вдоль
векторов скоростей, равны
![]() и
и
![]() .
Так как на основании первого следствия
теоремы о скоростях точек плоской фигуры
проекции
.
Так как на основании первого следствия
теоремы о скоростях точек плоской фигуры
проекции
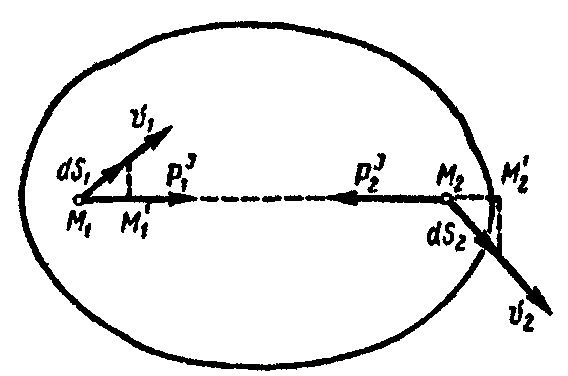
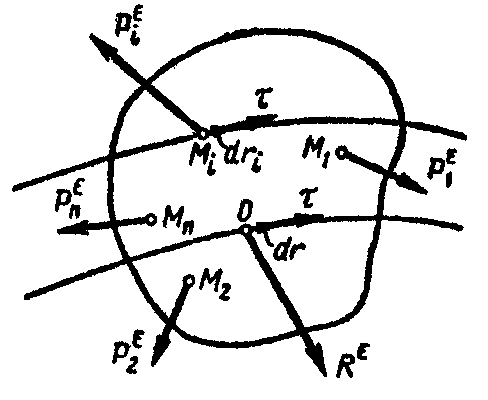
Рис. 9.13 Рис. 9.14
векторов скоростей и на направление отрезка M1,M2 равны, то, очевидно, и проекции элементарных перемещений этих точек на направление отрезка также равны, т. е.
![]() .
.
Поэтому, вычисляя сумму элементарных работ двух внутренних сил и на рассматриваемом перемещении и учитывая (9.24), получаем
![]() .
.
Так как каждой внутренней силе соответствует другая, равная ей по модулю и противоположная по направлению, то сумма элементарных работ всех внутренних сил тоже равна нулю.
![]() .
.
Конечное перемещение является совокупностью элементарных перемещений, а потому
![]() .
(9.25)
.
(9.25)
т.е. сумма работ внутренних сил твердого тела на любом его перемещении равна нулю.
Поступательное движение твердого тела. Выше установлено, что сумма работ внутренних сил твердого тела на любом его перемещении равна нулю.
Поэтому
следует вычислить лишь работу внешних
сил, приложенных к телу. Положим, что
к твердому телу, движущемуся поступательно,
приложены внешние силы
![]() (рис. 9.14). При поступательном движении
твердого тела траектории всех его точек
тождественны и параллельны. Следовательно,
векторы элементарных перемещений
всех точек геометрически равны между
собой, т.е.
(рис. 9.14). При поступательном движении
твердого тела траектории всех его точек
тождественны и параллельны. Следовательно,
векторы элементарных перемещений
всех точек геометрически равны между
собой, т.е.
![]() .
.
Элементарная работа силы
![]() .
.
Элементарная работа всех сил, приложенных к телу, равна элементарной работе внешних сил:
![]() но
но
![]() .
.
где — главный вектор всех внешних сил.
Следовательно,
![]() .
(9.26)
.
(9.26)
Выражение (9.26) показывает, что элементарная работа cuл, приложенных к твердому телу, движущемуся поступательно, равна элементарной работе главного вектора внешних сил, приложенного в любой точке тела.
Работа на конечном перемещении
![]() .
(9.27)
.
(9.27)
Вращение твердого тела вокруг неподвижной оси. Предположим, что к твердому телу, вращающемуся вокруг неподвижной оси z, приложены внешние силы (рис. 9.15). Вычислим сначала элементарную работу отдельной силы , которая приложена в точке Мi, описывающей окружность радиусом MiKi = Ri. Разложим эту силу на три составляющие, направленные по естественным осям траектории точки Мi:
![]() .
.
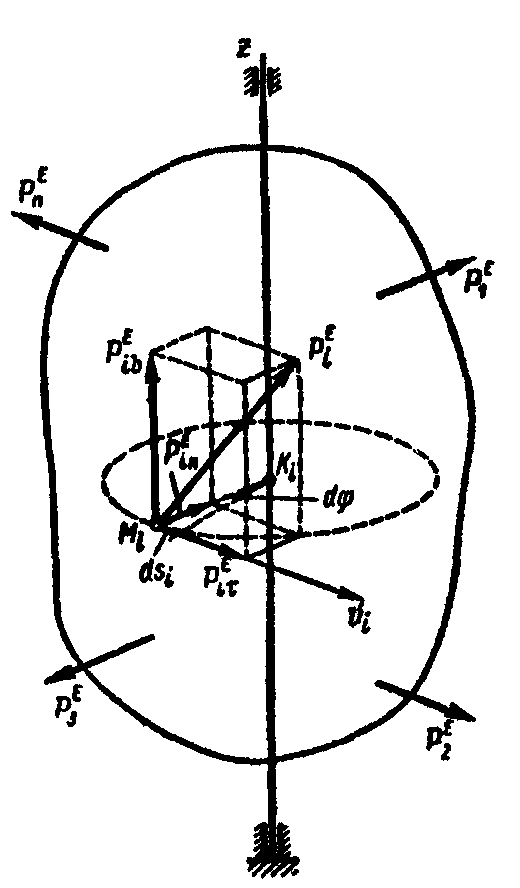
Рис. 9.15
Определим
момент силы
относительно оси z
как сумму моментов ее составляющих
относительно этой оси. Составляющая по
главной нормали
![]() пересекает ось z,
составляющая по бинормали
пересекает ось z,
составляющая по бинормали
![]() параллельна оси z;
следовательно, моменты
этих сил
равны
нулю. Таким
образом, момент
силы
относительно
оси z
равен моменту
силы
параллельна оси z;
следовательно, моменты
этих сил
равны
нулю. Таким
образом, момент
силы
относительно
оси z
равен моменту
силы
![]() ,
которая лежит в плоскости, перпендикулярной
оси z
:
,
которая лежит в плоскости, перпендикулярной
оси z
:
![]() .
.
При элементарном перемещении тела его угол поворота φ получает приращение dφ, а дуговая координата точки Мi — приращение dsi=Ri dφ. Вычислим работу силы на этом перемещении как сумму работ трех ее составляющих. Работа сил и -перпендикулярных вектору скорости точки Mi, равна нулю. Поэтому элементарная работа силы
![]() .
.
Элементарная работа всех сил, приложенных к твердому телу,
![]() .
.
где
![]() - главный момент внешних сил относительно
оси вращения z.
- главный момент внешних сил относительно
оси вращения z.
Таким образом,
![]() ,
(9.28)
,
(9.28)
т. е. элементарная работа сил, приложенных к твердому телу, вращающемуся вокруг неподвижной оси, равна произведению главного момента внешних сил относительно оси вращения на приращение угла поворота.
Если при вращении тела значение его угла поворота изменяется от φ1 до φ2 то сумма работ сил на этом конечном перемещении
 .
(9.29)
.
(9.29)
В
случае если главный момент внешних сил
относительно оси вращения тела постоянен,
![]() ,
,
 ,
(9.30)
,
(9.30)
т. е. в этом случае сумма работ сил на конечном перемещении равна произведению главного момента внешних сил относительно оси вращения на конечное изменение угла поворота тела.
В формуле (9.30) угол поворота выражен в радианах, т. е. представляет собой отвлеченную величину, а размерность работы совпадает с размерностью момента. Пользуясь формулой (9.29), можно определить мощность сил, приложенных к твердому телу, вращающемуся вокруг неподвижной оси с угловой скоростью ω:
![]() .
(9.31)
.
(9.31)
Общей
случай движения свободного твердого
тела.
Предположим, что к свободному твердому
телу, движущемуся как угодно в пространстве,
приложены внешние силы
(рис. 9.16). Элементарное перемещение
свободного твердого тела можно разложить
на поступательное перемещение с
некоторым полюсом О, определяемое
приращением дуговой координаты dso,
и поворот на элементарный угол
![]() вокруг мгновенной оси
Ώ, проходящей
через полюс. Сумма элементарных работ
всех сил на поступательном перемещении
определится по формуле (9.26) как элементарная
работа главного вектора внешних сил
,
приложенного в полюсе О.
вокруг мгновенной оси
Ώ, проходящей
через полюс. Сумма элементарных работ
всех сил на поступательном перемещении
определится по формуле (9.26) как элементарная
работа главного вектора внешних сил
,
приложенного в полюсе О.
Сумма
элементарных работ всех сил на перемещении
при повороте вокруг мгновенной оси
О
определится по формуле (9.28) как произведение
главного момента внешних сия относительно
мгновенной оси
![]() на элементарный угол
на элементарный угол
![]() .
Тогда элементарная работа всех сил,
приложенных к свободному твердому телу,
движущемуся как угодно,
.
Тогда элементарная работа всех сил,
приложенных к свободному твердому телу,
движущемуся как угодно,
![]() .
(9.32)
.
(9.32)
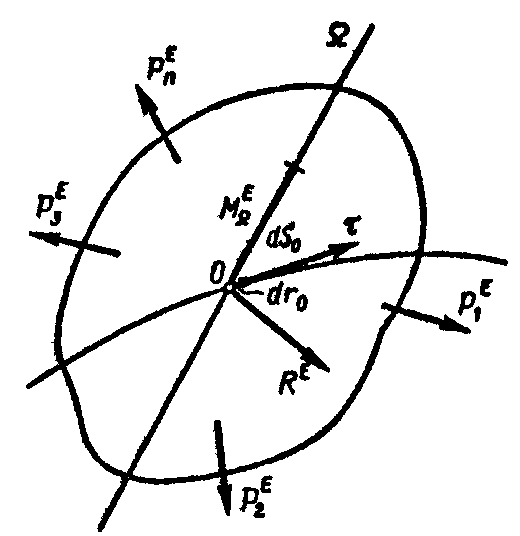
Рис. 9.16
Таким образом, элементарная работа внешних сил, приложенных к свободному твердому телу в общем случае его движения, равна сумме элементарных работ их главного вектора на перемещении точки его приложения — полюса и главного момента этих сил относительно мгновенной оси, проходящей через полюс, на перемещении при повороте вокруг этой оси.
Пример. Цилиндр, масса которого т = 1 кг, радиус r = 0,173 м, катится без скольжения (9.17). Определить суммарную работу силы тяжести и силы сопротивления качению, если ось цилиндра переместилась на расстояние s = 1 м и коэффициент трения качения δ = 0,01 м.
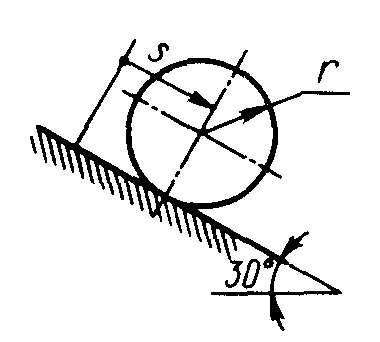
Рис. 9.17
Решение.

![]()
![]() .
.
Лекция 10
ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
МАТЕРИАЛЬНОЙ ТОЧКИ И МЕХАНИЧЕСКОЙ СИСТЕМЫ
1. Теорема об изменении кинетической энергии
материальной точки
Рассмотрим материальную точку М массой т, движущуюся под действием сил . Установим зависимость между работой, совершаемой приложенными к точке силами на перемещение М1М2, и изменением кинетической энергии точки на этом перемещении (рис. 10.1). Выберем начало и направление отсчета дуговой координаты s=ОМ. Укажем в точке М орт касательной τ, направленный всегда в сторону увеличения дуговой координаты. Проекция скорости точки на касательную определяется так:
![]() .
.
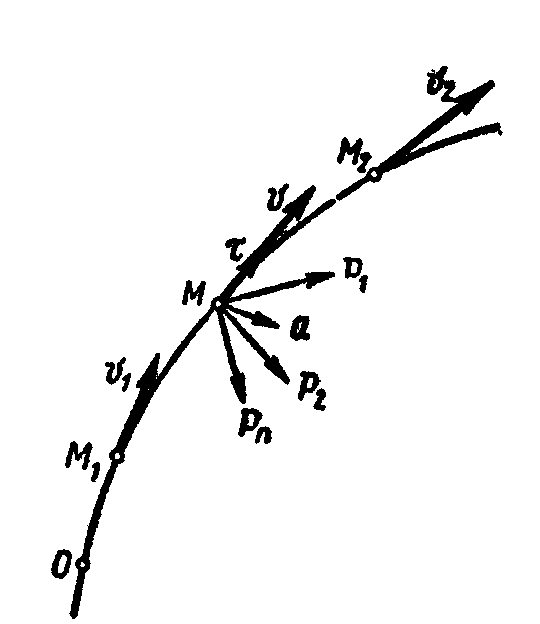
Рис. 10.1
Проекция ускорения точки на касательную
![]() или
или
![]() .
.